




近年來,隨著機器人技術的快速發展,機器人的應用已經越來越廣泛。自動導引車AGV作為一種輪式移動機器人,具有可靠性高、適應能力強、自動化程度高等優點,在現代制造系統和倉儲物流系統中被廣泛用于貨物的運送與傳輸,是現代倉儲系統及柔性制造系統的關鍵設備之一“。導引與軌跡跟蹤是實現AGV自主移動的關鍵技術,鋪設預定軌跡的方法具有使用方便、成本低的特點,目前被廣泛應用于工程實際。由于AGV車輪與地面之間屬于非完整約束,難以建立較為精確地運動學模型,很多經典成熟的控制算法(如PID控制算法)較難實現而模糊控制是一種基于實踐經驗通過語言描述的方式來進行分類的算法,無需建立精確的數學模型,容錯能力強,應用于非線性系統、高耦合系統等控制系統時有著很好的效果。根據叉車式AGV的結構特點設計了相應的模糊控制器,較好地解決了叉車式AGV在不同路徑下的磁導航問題。
1.叉車式AGV結構與運動分析
1.1結構及驅動部分
叉車式AGV的底盤結構主要有五輪式和三輪式。三輪式叉車AGV既不能自轉也不能平移,靈活性和穩定性都較差閻。五輪式叉車AGV相較于三輪式,在舵輪左右兩側各增加一個萬向輪,既提升了支撐平衡的性能,也能輔助轉向,綜合性能優于二輪式。在此所研究開發的五輪叉車式AGV的相關尺寸如圖1所示。
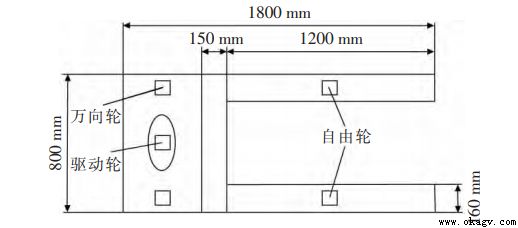
圖1 AGV的底盤結構及尺寸
1.2叉車式AGV的運動和糾偏分析
考慮到叉車式AGV運行時的安全性,通常需保證貨叉在人的前方,而AGV的驅動輪位于整車的后部,造成了其運動方式與別的車輛有些不同。以驅動輪和自由輪為代表,對其運動特性進行分析,如圖2所示。首先假定AGV與地面間無滑動摩擦,且地面為水平面。當AGV發生轉動時,例如,需要AGV往上方偏移一定位移的航線上行駛時。此時,驅動輪率先順時針轉動,再驅動AGV往前行駛,將自由輪驅動到預定的航線上去,然后驅動輪再反向轉動,將自身調整到航線上去。該過程通過驅動輪的擺動效果將AGV的運動軌跡調整到理想的航線上。調整過程中沿理想航線上行駛的距離稱為調整距離礫調整距離與AGV自由輪的轉速、驅動輪轉動速度以及2條航線的偏距有關。
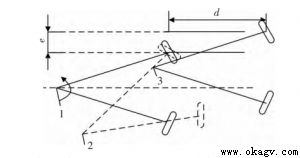
1,2,3分別為叉車在糾差過程中出現的初始位置、中間過程、最終位置
圖2叉車式AGV底盤運動
2.AGV的導航與控制系統
2.1AGV的導航方式
AGV的導航方式有多種,目前國內常見的有4種,①激光導引利用激光測距以及角度來確定自身定位,并實現按照期望的軌跡運動;②視覺導引通過不斷地獲取周圍的場景信息來定位,在運動過程中邊定位邊建立場景地圖,最終建立整個環境的模型,從而實現自主導航;③慣性導航根據已知位置信息,通過對運動過程中速度和方位的積分來獲取自身定位,從而可達到導航的目的;④磁導航通過在預設路徑上鋪設磁條的方法,裝在AGV上的磁傳感器獲取磁條信息,并通過實時糾偏,從而保證AGV按照預設的軌道行進。以上方式中,磁導航以使用方便、成本低等優點廣泛應用于工程實際,故在此基于磁導航展開研究。
2.2控制系統硬件組成
控制系統主要由三大部分構成,即感知部分、決策部分和執行部分,如圖3所示。
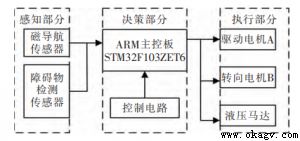
圖3 控制系統組成
1)感知部分作為信息的采集與輸人,將底座與磁條的偏差信息傳人承擔決策作用的STM32開發板。主要有紅外傳感器、超聲波傳感器,經傳感器信息融合后,可識別叉車周圍的環境。
2)決策部分是以STM32F103ZET6嵌人式芯片為控制系統的核心芯片。該芯片是基于Cortex-M3的內核,可以有效地處理感知部分傳來的信息,并將分析計算后的結果傳送到執行部分,如圖4所示。
圖4 ARM主控板
3)執行部分主要由轉向輪電機與直行輪電機以及貨叉結構的液壓馬達組成,以實現叉車的移動和貨物的運送。
2.3 控制系統軟件結構
該AGV有2種導航控制方式,基于預設磁條的自主導引控制和手動操作控制。軟件控制系統的架構如圖5所示。其中,手動控制比較簡單,通過電控驅動AGV前進后退,用于AGV的調試和人工駕駛。
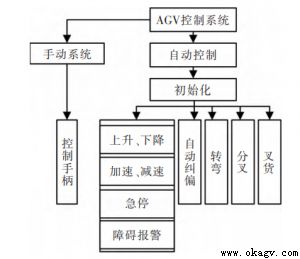
圖5 AGV軟件系統結構
自動控制模式下,一方面需要實時獲取AGV相對預設磁條的偏移量,并通過糾偏程序及時地減小偏差,另一方面基于安全考慮,當有意外發生或者磁條上有障礙物存在時,AGV應能夠自動緊急制動,并在障礙物移除后可以恢復運行狀態。此外,在實際工程中,直線行駛是AGV移動的主要運動狀態,考慮到工程效率問題,還需要編寫加減速程序。因此,在自動控制模式下主要需要編寫自動糾偏程序、緊急制動程序、加減速程序、轉彎程序以及貨叉升降程序。
3. 模糊控制算法設計
模糊控制是一種模擬人思維的過程,即通過對事物進行觀察、分析,最終做出判斷與決策。L.A.Zadeh提出不相容原理,隨著系統的復雜度增大,系統的清晰程度就會逐漸降低,當達到一定的閾值時,清晰性和復雜性將互相排斥,于是就產生了模糊控制凹。模糊控制是一種非線性控制,核心是利用模糊集合的理論知識,將控制算法轉變為計算機語言所能描述的語言。由于模糊控制具有較強的魯棒性,不需要建立精確的數學模型,尤其是在處理非線性、強耦合時變等控制系統時有較好的效果。
模糊控制器的工作原理是將輸人的清晰信號經過模糊化接口變成模糊量,然后經過模糊推理算法計算,經過模糊推理機處理后得到模糊集合,最后由去模糊化將模糊集合變成清晰量。最基本的模糊控制系統結構如圖6所示。
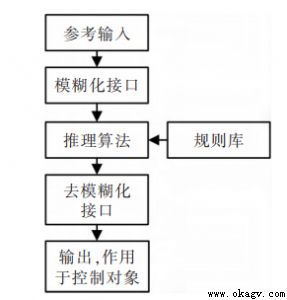
圖6 模糊控制器的結構
糾偏程序是自動控制模式中的核心,糾偏程序越合理,AGV的軌跡追蹤性能就越好。當AGV運行在直線及轉彎角度不是很大的弧線上時,將調用糾偏程序。
該AGV所采用的磁導航傳感器具有16個磁信號監測點,安裝于AGV前端,距離地面2處,選擇的磁條寬度為3。在磁條豎直方向上,磁傳感器可以同時接通4個磁信號,為確定AGV相對磁條的位置,將磁傳感器各個監測點進行編號,H0—H15巧分別為16個監測點,以低電勢0表示未檢測到磁信號,以高電勢1表示檢測到磁信號。當檢測到磁信號時,指示燈亮起,所有的電勢信息依次存儲在寄存器中,共占據16字節。糾偏程序中需要針對偏移情況采取繼續直行、左偏、右偏的糾偏動作。當正中間的4個監測點對應的指示燈亮起時,此時對應電位為1,表示AGV處于直行狀態,見表1。

表 1 磁傳感器對應控制器 I/O 端口
考慮到地面不完全平整,應當允許一定的誤差范圍,當正中間4個監測點左右兩側的另一個指示燈亮起時,也視為直行狀態。根據上述分析,可將傳感器電位情況模糊化為3種偏差狀態,見表2。
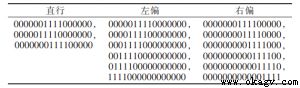
表2 三種偏差狀態
為使AGV的運行軌跡與預設軌跡更加接近,在編寫程序時,根據不同的偏移程度使轉向電機的輸出力矩有所不同,且糾偏程序中的轉向應與表2相反。
4. 路徑規劃與軌跡跟蹤試驗
4.1 試驗裝置及路徑規劃
選取實驗室改造的AGV作為軌跡跟蹤的試驗對象,如圖7所示。

圖 7 叉車式 AGV 試驗裝置
圖中,磁傳感器位于AGV驅動輪中軸線上,與地面間的距離為2cm,設置了直行、轉彎、叉貨、卸貨等位置的引導路徑,所設路徑可以滿足一般貨場的使用要求。根據實際工程需要,預鋪設磁導引線,貨叉軌跡路徑規劃如圖8所示。空載的AGV從停靠點A出發,沿磁條移動到位置C,然后AGV由位置C運動到位置D處,然后直行至E出倉庫,將貨叉叉人貨物底部取料,托起貨物后回退到位置F,然后沿磁條運行至位置F',然后沿原路線返回至位置A。
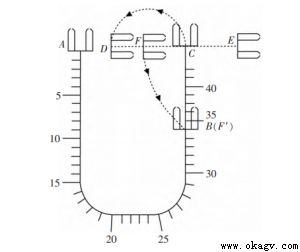
圖 8 貨叉軌跡路徑規劃
4.2 軌跡跟蹤試驗
AGV的軌跡跟蹤是指讓AGV沿著預鋪設好的磁條移動。其主要通過實時地調節速度矢量,使AGV保持在磁條上方移動。根據磁傳感器感應到的磁信號,可得到位移的偏移量一一左偏1~4位,右偏1~4位,根據偏移量的不同使轉向電機輸出不同的轉向力矩和驅動力矩。AGV性能測試借鑒姚建余對移載式實驗型AGV的研究方法,在磁引導線上面貼上20CM×3CM的白色標志條(如圖9所示),另外將水性畫筆固定在磁傳感器的中心位置處,并使畫筆筆芯剛好與標志條相接觸,記錄AGV的實際運動軌跡。

圖 9 AGV 模糊控制自動導引系統測試
在進行一次叉貨,送貨和卸貨后,對各標志條上的筆記進行測量,分別記錄各標志條筆跡的橫向偏移距離,經MatLab分析后得到的結果如圖10所示。
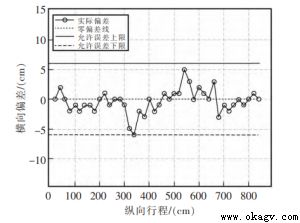
圖 10 AGV 監測點橫向誤差
由圖可見,AGV在剛啟動時偏差范圍很小,最大偏差為2cm;在走直線路段時,偏差依舊很小;當走轉彎路段時,AGV的偏差便增大,且增大到一定范圍后開始減小,繼而又增大。因此,叉車式AGV在走轉彎路段時的行走路線是曲折的。由試驗結果可見,AGV的偏差范圍為±6cm,可以滿足設計的偏差要求范圍。
5 結語
針對叉車式AGV的運動和磁導引特點,設計了一款模糊控制器。對磁傳感器檢測獲取的數字量偏差信號進行分析處理,按照模糊控制規則將結果輸出給驅動電機;分析了實際工程中的各種路況工作軌跡,通過編寫程序實現AGV的自主導航,提高AGV的糾偏能力。試驗結果表明,基于模糊控制的叉車式AGV具有較好的軌跡跟蹤性能。
參考文獻:
[1] 楊天旭,樓佩煌,錢曉明.融合多模糊控制器的全方位移動 AGV路徑跟蹤控制技術[J].機械設計與制造工程,2016,45(7):57-61.
[2] 任彧,趙師濤.磁導航 AGV 深度強化學習路徑跟蹤控制方法[J].杭州電子科技大學學報:自然科學版,2019,39(2):28-34.
[3] Chen D D,Shi Z Y,Yuan P J,et al. Trajectory tracking controlmethod and experiment of AGV[C]//2016 IEEE 14th InternationalWorkshop on Advanced Motion Control (AMC).IEEE,2016:24-29.
[4] 葛紅豆,赫雷,曹雛清,等.基于模糊 PID 控制的 AGV 控制[J].兵工自動化,2017,36(12):76-79.
[5] 孔繁望. 基于不同型式 AGV 的建模及軌跡跟蹤控制方法的設計和應用[D].杭州:浙江大學,2018.
[6] 王殿君,關似玉,陳亞,等.雙驅雙向 AGV 機器人運動學分析及仿真[J].制造業自動化,2016,38(3):42-46,56.
[7] 周 曉 杰.AGV 系 統 及 引 導 方 式 發 展 趨 勢 綜 述[J].南 方 農 機 ,2017,48(4):80.
[8] 覃尚活. 磁導航叉車式 AGV 控制導引系統的研究與開發[D].南寧:廣西大學,2017.
[9] 顧俊,張宇.模糊控制的應用現狀與發展趨勢[J].化工自動化及儀表,2017,44(9):811-812,902.
[10] Xiong B,Qu S R. Intelligent vehicle’s path tracking based onfuzzy control[J].Journal of Transportation Systems Engineering andInformation Technology,2010,10(2):70-75文章來源于AGV吧
如果轉載,請注明本文地址:http://www.so417.cn/jishu_14433016.html
上一條:AGV的核心技術有哪些? 下一條:AGV在BEV汽車后橋裝配線中的應用設計
