īŻśI╠ß╣®é}ā”╬’┴„╔²╝ēĖ─įņĪó¤o╚╦░ß▀\ÖCŲ„╚╦«aŲĘ
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860





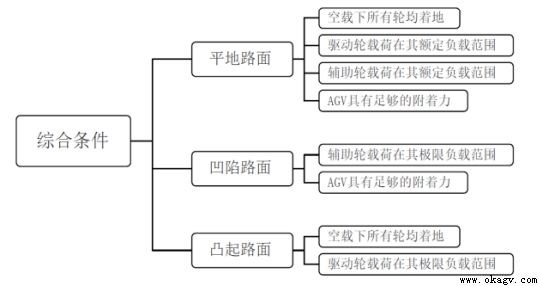
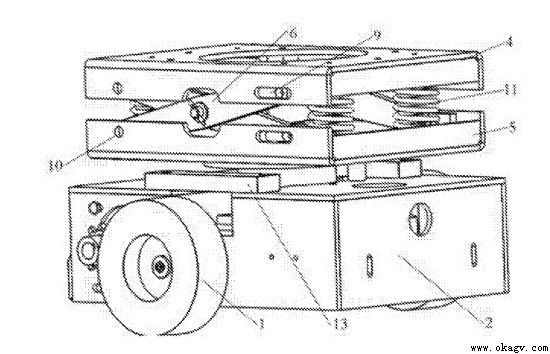
ļSų°╬ęć°Ą─ųŲįņśI▐Dą═╔²╝ē▓ĮĘźĄ─╝ė┐ņŻ¼ÖCąĄūįäė╗»┤·╠µ╚╦╣żä┌äė┴”ę▓│╔┴╦«öĮ±Ą─ųž³cĪŻŽÓ▒╚ęįŪ░Ż¼╚ńĮ±Ą─╬’┴„╝░╬’┴Ž░ß▀\ą╬╩ĮęčųØuĄžė╔é„Įy╚╦╣ż░ß▀\▐D×ķųŪ─▄ūįäė░ß▀\ą╬╩ĮŻ¼AGV ęč╩Ū─┐Ū░ć°ā╚ųŲįņśIæ¬ė├ūŅÅVĘ║Ą─░ß▀\ÖCŲ„╚╦ų«ę╗ĪŻ
AGVūŅįńį┤ė┌é}ā”╬’┴„Ż¼ŲõųąĄ─æ¬ė├ŁhŠ│Śl╝■▒╚▌^┴╝║├Ż¼▓óŪęAGVĄ─æ¬ė├ł÷Ąžę▓ėąŽÓĻPĄ─ś╦£╩Č©┴xĪŻļSų°ųŪ─▄╬’┴„Ą─’w╦┘░lš╣Ż¼AGV¼Fęč╔µūŃųŲįņśIĪóĖ█┐┌░ß▀\Īó░▓Ę└č▓ÖzĄ╚ŅIė“Ż¼æ¬ė├Ą─ŅIė“ĘČć·öU┤¾ęŌ╬Čų°▀\ąął÷Š░Ą─Å═ļsČ╚╠ß╔²Ż¼ę“┤╦Ż¼AGVĄ─▀mæ¬ąį─▄ę▓欫ö╠ßĖ▀ĪŻū„×ķAGVĄ─▀mæ¬ĮYśŗų«ę╗Ą─£pšĖĪäėĮYśŗŻ¼─┐Ū░Ż¼ŲõĮYśŗą╬╩ĮĘ▒ČÓŻ¼ī”ė┌▓╗═¼Ą─ AGV Ąū▒Pą╬╩ĮĪó│ą▌d┴┐Ż¼£pšĖĪäėĮYśŗę▓▓╗═¼ĪŻ▒Š╬─═©▀^┴ą┼e─┐Ū░AGV │ŻęŖĄ─£pšĖĪäėĮYśŗą╬╩ĮŻ¼╝ėęį蹊┐Ęų╬÷Ųõ£pšĄ─╠žąįŻ¼ęįī”AGV Ą─æęÆņĖĪäėŽĄĮyįOėŗ╠ß╣®╠žąįĘų╬÷ęį╝░└Ēšōģó┐╝ĪŻ
┤¾¾w╔ŽüĒšfŻ¼AGVĄ─£pšĖĪäėĮYśŗ╩Ūę¬╩╣AGV½@Ą├┐╔ęįį┌Å═ļs┬Ę├µ╔Žąą±éĄ─ąį─▄Ż¼ŲõŠ▀¾w░lō]Ą─ū„ė├Ż║
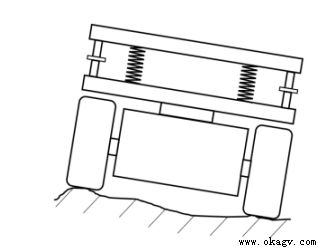
(1)▌åŽĄ╣▓═¼ų°ĄžĪŻį┌AGVŠ▀ėąČÓ▌åĄ─▓╝Šų▌åŽĄųąŻ¼×ķ▒ŻūC“īäė▌åų°ĄžŻ¼ę╗░ŃĄ─ŽļĘ©╩Ūīó“īäėå╬į¬░▓čbĄ├▒╚Ųõ╦¹▌oų·▌å═╣│÷üĒęį▒ŻūC“īäė▌åĄ─╩ūŽ╚ų°ĄžĪŻĄ½╚ń┤╦ę╗üĒĪŻ▌oų·▌åīŹļH▓óø]ėą┼cĄž├µ┘NŠoŻ¼ī¦ų┬Ė³ČÓĄ─▌d║╔╩®╝ėĄĮ“īäėå╬į¬╔ŽŻ¼ĮĄĄ═┴╦AGVĄ─│ą▌d─▄┴”Ą─═¼ĢrŻ¼AGVĄ─ąą±éĘĆČ©ąįę▓Ģ■ĮĄĄ═ĪŻ
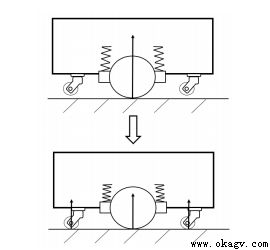
─Ū├┤Ż¼į┌╔Ž╩÷Ą─╗∙ĄA╔ŽŻ¼£pšĖĪäėĮYśŗ╩╣“īäėå╬į¬Š▀ėą╔ŽŽ┬ē║┐sĄ─ūįė╔Č╚ĪŻ╚ńłD1╦∙╩ŠŻ¼į┌“īäė▌å═Ō═╣Ž┬Ż¼═©▀^AGVĄ─ūįųžīó“īäė▌åē║ų┴┼c▌oų·▌åŲĮ²RĪŻ═©▀^£pšĖĪäėĮYśŗüĒīŹ¼FČÓ▌å╣▓═¼ų°Ąžå¢Ņ}Ż¼▒ŻūC┴╦AGVĄ─“īäė┴”═ŌŻ¼▌oų·▌åĄ─ų°Ąžę▓Ęųō·┴╦ę╗▓┐ĘųĄ─│ą▌dĪŻ
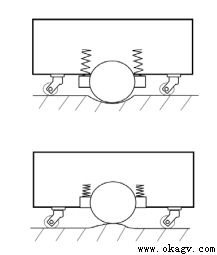
(2)▀mæ¬▓╗ŲĮ┬Ę├µĪŻį┌AGVĄ─ū„śIŁhŠ│ųąŻ¼┬Ę├µĄ─▓╗ŲĮĢ■ī¦ų┬“īäė▌åæę┐šęįų┬╩╣AGV╩¦╚źäė┴”╗“▒╗ĒöŲĪŻ£pšĖĪäėĮYśŗųąĄ─ÅŚ╗╔Ģ■╩╣“īäė▌å╩╝ĮK┼cĄž├µ┘NŠoŻ¼ė÷ĄĮ═╣Ų┬Ę├µĢrŻ¼ė╔ė┌“īäėå╬į¬Ą─ĖĪäėąįęį╝░ÅŚ╗╔Ą─┐╔ē║┐sąįŻ¼┐╔▒▄├Ō“īäėå╬į¬Ä¦äėAGVš¹¾w▒╗ĒöŲĪŻÅŚ╗╔Ą─Ę┤ū„ė├┴”╩╣“īäė▌å╩╝ĮK┼cĄž├µ┘NŠoŻ¼Ąž├µę▓Ģr┐╠╠ß╣®“īäė▌åų¦│ą┴”ęį▒ŻūCŠ▀ėąūŃē“Ą─ĖĮų°┴”Ż¼▒ŻūC┴╦AGV▓╗Ģ■ę“┬Ę├µ▓╗ŲĮČ°╩¦╚źäė┴”ĪŻ
łD1 AGVūįųžīó“īäė▌åē║ų┴ŲĮ²R
łD2 ĖĪäėĮYśŗĄ─┬Ę├µ▀mæ¬ąį
(3)£pŠÅø_ō¶┴”ĪŻ┬Ę├µĄ─▓╗ŲĮęį╝░ąąÅĮĘĮŽ“Ą─šŽĄK╬’Ģ■ī”“īäėå╬į¬įņ│╔ø_ō¶Ż¼Č°£pšÅŚ╗╔īóŲõø_ō¶╬³╩šŻ¼ėąą¦ŠÅĮŌø_ō¶┴”ī”“īäėå╬į¬Ą─ŲŲē─Ż¼čėķL“īäėå╬į¬Ą─╩╣ė├ē█├³ĪŻ
×ķ┴╦▒ŻūC£pšĖĪäėĮYśŗ─▄░lō]╔Ž╩÷Ą─Š▀¾w╣”─▄Ż¼ŲõĮYśŗĄ─įOėŗ欫öØMūŃę╗Č©Ą─Śl╝■Ż¼Ę±ätŻ¼Ģ■│÷¼FĖĪäėäéČ╚▀^┤¾╗“▀^ąĪ╦∙ę²ŲĄ─╣”─▄╩¦ą¦ĪŻ
¼F╝┘Č©£pšÅŚ╗╔Ą─╦∙ąĶäéČ╚×ķkĪó┬Ę├µŲĘ³▓╗ŲĮČ╚×ķĪ└”─Īó“īäė▌å░▓čb═Ō═╣┴┐×ķ”╦ĪŻ─Ū├┤Ż¼į┌Ęų╬÷£pšĖĪäėĮYśŗųąŻ¼æ¬«ö░čAGVĄ─ū„śI┬Ę├µĀŅørĘų×ķ╚²ĘNüĒ
Š▀¾wĘų╬÷Ż║
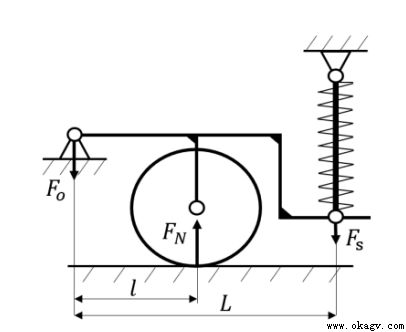
(1)ŲĮĄž┬Ę├µĪŻŲĮĄž┬Ę├µ╩ŪAGVū„śIĢrķgūŅķLĄ─╣żørŻ¼┤╦ĢrŻ¼AGVæ¬įō▒ŻūC╦∙ėą▌åūė╣▓═¼ų°ĄžĪóĖ„▌åĄ─│ą▌dį┌ŲõŅ~Č©│ą▌dĘČć·ā╚Īó“īäė▌åĄ─ĖĮų°┴”ūŃęįĘ└ų╣▌åūė┤“╗¼ĪŻ
«öAGV╦∙╠ÄŲĮĄž┬Ę├µĢrŻ¼╝┤“īäė▌å┼cŲõ╦¹▌oų·▌å╠Äė┌ŲĮ²RĀŅæBŻ¼─Ū├┤Ż¼┤╦ĢrĄ─£pšÅŚ╗╔ŽÓ«öė┌▒╗ē║┐s┴╦═Ō═╣┴┐”╦Ż¼┤╦ĢrŻ¼“īäė▌å┼cĄž├µĄ─ū„ė├┴”FN1×ķŻ║
FN1 = (”ż+”╦)Īżnk
╩ĮųąŻ¼”ż×ķÅŚ╗╔Ą─░▓čbŅAē║┴┐Ż╗n ×ķÅŚ╗╔öĄ┴┐ĪŻ
į┌│ą▌d╔ŽĒÜØMūŃŻ║
FN1 Ī▄ Fmax1
FN2 Ī▄ Fmax2
FN2 = f(FN1,G)
╩ĮųąŻ¼Fmax1“īäė▌åĄ─Ņ~Č©žō▌dŻ╗FN2ŲĮ┬Ę╔Ž▌oų·▌åĄ─ų¦│ą┴”Ż╗Fmax2×ķ▌oų·▌åĄ─Ņ~Č©žō▌dŻ╗G×ķAGV╣żū„
š¹¾wųž┴┐Ż╗f(FN1,G)ĻPė┌FN1║═GĄ─ĘĮ│╠╩ĮŻ¼▌åŽĄĮYśŗĄ─▓╗═¼Ż¼Ųõėŗ╦ŃĘĮ│╠ę▓▓╗ę╗śėĪŻ
į┌“īäė▌åĖĮų°┴” Ff╔ŽĒÜØMūŃŻ║
Ff ŻŠ Fq
Ff = FN1Īż”╠1
Fq = GĪż”╠2
╩ĮųąŻ¼Fq×ķAGVąąū▀╦∙ąĶĀ┐ę²┴”Ż╗”╠1×ķ“īäė▌å┼cĄž├µĄ─ĖĮų°ŽĄöĄŻ╗”╠2×ķAGVĄ─ØLäė─”▓┴ŽĄöĄĪŻ
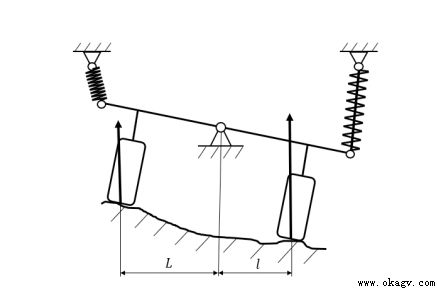
(2)░╝Ž▌┬Ę├µĪŻį┌░╝Ž▌┬Ę├µųąŻ¼×ķ╩╣“īäė▌å┘NŠoĄž├µŻ¼£pšÅŚ╗╔Ģ■īó“īäė▌åĒöŠoĄž├µŻ¼┤╦ĢrŻ¼ÅŚ╗╔ŽÓ▒╚ŲĮĄž┬Ę├µĢrą╬ūā┴┐ęį╝░“īäė▌åĄ─ē║┴”Š∙ūāąĪŻ¼Č°Ųõ╦¹▌oų·▌åĄ─ē║┴”ūā┤¾ĪŻ
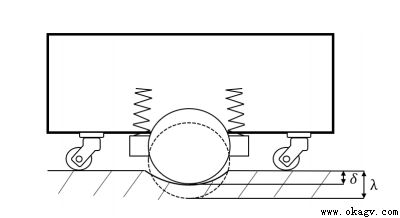
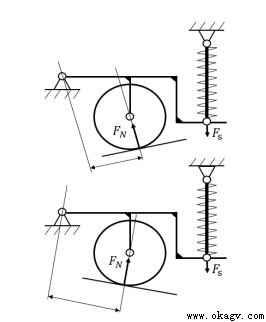
Å─łD 3 Ą─Äū║╬ĻPŽĄ┐╔ų¬Ż¼«ö AGV ╦∙╠Ä░╝Ž▌┬Ę├µĢrŻ¼┤╦ĢrŻ¼£pšÅŚ╗╔Ą─ē║┐s┴┐īŹļH╩Ū═Ō═╣┴┐┼c┬Ę├µ▓╗ŲĮČ╚ų«▓ŅŻ¼ė╔┤╦┐╔ęŖŻ¼“īäė▌åĄ─═Ō═╣┴┐▒žĒÜ┤¾ė┌┬Ę├µ▓╗ŲĮČ╚Ż¼
ʱätŻ¼į┌░╝Ž▌┬Ę├µĢr“īäė▌åĢ■╠Äė┌æę┐šĀŅæBĪŻ
╚ń╣¹▒ŻūC┴╦AGVį┌ŲĮĄžųą╦∙ėą▌åūė╣▓═¼ų°ĄžŪę“īäė▌åĄ─═Ō═╣┴┐┤¾ė┌┬Ę├µ▓╗ŲĮČ╚Ż¼ätAGV╠Äė┌░╝Ž▌┬Ę├µĢr╦∙ėą▌åūėę▓▒žČ©╣▓═¼ų°ĄžŻ¼ę“┤╦Ż¼ąĶ▒ŻūCĄ─╩ŪĖ„▌åĄ─│ą▌dŲõ│ą▌dĘČć·ā╚Īó“īäė▌åĄ─ĖĮų°┴”ūŃęįĘ└ų╣▌åūė┤“╗¼ĪŻ
┤╦ĢrŻ¼“īäė▌å┼cĄž├µĄ─ū„ė├┴”FN1'×ķŻ║
FN1 = (”ż+”╦-”─)Īżnk
”╦ > ”─
łD3 ░╝Ž▌┬Ę├µĢrĄ─ÅŚ╗╔ą╬ūā┴┐
ŽÓ▒╚ŲĮĄž┬Ę├µ║═░╝Ž▌┬Ę├µŻ¼ÅŚ╗╔ą╬ūā┴┐£p╔┘Ż¼ät“īäė▌åžō▌dūāąĪČ°▌oų·▌åžō▌dūā┤¾ĪŻė╔ė┌░╝Ž▌┬Ę├µĄ─╣żørŅl┬╩Ą═ė┌ŲĮĄž┬Ę├µŻ¼╝┤▌oų·▌åĄ─┤¾žō▌d╣żū„Ģrķg▌^Č╠Ż¼
┤╦ĢrŻ¼▌oų·▌åžō▌d╠Äė┌ŲõśOŽ▐žō▌dĘČć·ā╚╝┤┐╔Ż©╚ńįō╣żørŅl┬╩▌^Ė▀Ż¼ätĒÜ╠Äė┌Ņ~Č©žō▌dĘČć·ā╚Ż®Ż¼ät£pšĖĪäėĮYśŗį┌│ą▌d╔ŽĒÜØMūŃŻ║
FN1' Ī▄ Fmax1'
FN2' Ī▄ Fmax2'
FN2' = f(FN1',G)
╩ĮųąŻ¼FN2'×ķ░╝Ž▌┬Ę├µ╔Ž▌oų·▌åĄ─ų¦│ą┴”;Fmax2'×ķ▌oų·▌åĄ─śOŽ▐žō▌d;f(FN1',G)ĻPė┌FN1'║═GĄ─ĘĮ│╠╩ĮŻ¼▌åŽĄĮYśŗĄ─▓╗═¼Ż¼Ųõėŗ╦ŃĘĮ│╠ę▓▓╗ę╗śėĪŻ
į┌“īäė▌åĖĮų°┴”Ff'╔ŽĒÜØMūŃŻ║
Ff' > Fq
Ff' = FN1'Īż”╠1
(3)═╣Ų┬Ę├µĪŻį┌═╣Ų┬Ę├µųąŻ¼ė╔ė┌┬Ę├µ═Ō═╣īó“īäėå╬į¬Ą─£pšÅŚ╗╔ē║┐sŻ¼└Ēšō╔Ž£pšÅŚ╗╔Ą─ē║┐s┴┐Ģ■┤¾ė┌ŲĮĄžĢrĄ─ÅŚ╗╔ē║┐s┴┐ĪŻĄ½╚ń╣¹ÅŚ╗╔į┌ē║┐s▀^│╠Ą─ÅŚ┴”ęčĮøūŃęįų¦│ą AGV š¹¾wĄ─ųž┴┐ĢrŻ¼─Ū├┤Ż¼ÅŚ╗╔▓╗į┘ē║┐sŻ¼Č°╩Ū╚ń═¼äéąį▀BĮėę╗░ŃīóAGVš¹¾wĒöŲĪŻ╚ń╔Ž╩÷Ęų╬÷Ż¼┤╦ĢrŻ¼ÅŚ╗╔ē║┐s┴┐ūŅ┤¾Ż¼ę“┤╦“īäė▌åĄ─žō▌dūŅ┤¾ĪŻ
×ķ▒ŻūC╦∙ėą▌åūė╣▓═¼ų°ĄžŻ¼æ¬▒ŻūC═╣Ųē║┐sÅŚ╗╔ĢrŻ¼ÅŚ╗╔Ą─ÅŚ┴”▓╗Ģ■īóAGVš¹¾wų¦│ąŲüĒŻ¼ät“īäė▌å┼cĄž├µĄ─ū„ė├┴”FN1"ĒÜØMūŃŻ║
FN1" = (”ż+”╦+”─)Īżnk
2FN1" < G [caption id="attachment_478" align="aligncenter" width="382"]
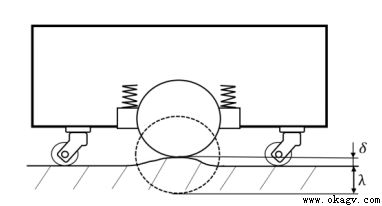
łD4 ═╣Ų┬Ę├µĢrĄ─ÅŚ╗╔ą╬ūā┴┐[/caption]
═╣Ų┬Ę├µųąŻ¼┤╦ĢrŻ¼“īäė▌åžō▌dūŅ┤¾Ż¼▌oų·▌åĄ─žō▌dūŅąĪĪŻė╔ė┌═╣Ų┬Ę├µĄ─╣żørŅl┬╩ę└╚╗Ą═ė┌ŲĮĄž┬Ę├µŻ¼“īäė▌åāHČ╠Ģrķg│ą╩▄┤¾žō▌dŻ¼╦∙│ą▌dĄ─žō▌d╠Äė┌ŲõśOŽ▐žō▌dĘČć·ā╚╝┤┐╔ĪŻät£pšĖĪäėĮYśŗį┌│ą▌d╔ŽĒÜØMūŃŻ║
FN1" Ī▄ Fmax1'
FN2" Ī▄ Fmax2'
FN2" = f(FN1",G)
╩ĮųąŻ¼Fmax1'×ķ“īäė▌åĄ─śOŽ▐žō▌d;FN2"═╣Ų┬Ę├µ
╔Ž▌oų·▌åĄ─ų¦│ą┴”;f(FN1",G)ĻPė┌FN1"║═GĄ─ĘĮ│╠╩ĮŻ¼▌åŽĄĮYśŗĄ─▓╗═¼Ż¼Ųõėŗ╦ŃĘĮ│╠ę▓▓╗ę╗śėĪŻ
(4)ŠC║ŽŚl╝■ĪŻŠC║Ž╔Ž╩÷(1)Īó(2)Īó(3)3ĘN╣żørŽ┬Ą─Śl╝■Ż¼£pšĖĪäėĮYśŗąĶę¬ØMūŃĄ─ŠC║ŽŚl╝■╚ńŽ┬Ż║
ī”ė┌╔Ž╩÷Ą─ŠC║ŽŚl╝■Ż¼├┐ĒŚŚl╝■Č╝┐╔╚ń╔Ž╩÷Ęų╬÷śŗĮ©ŲŽÓĻPÅŚ╗╔äéČ╚Ą─ĘĮ│╠╩Įęį╝░ĘČć·▓╗Ą╚╩ĮŻ¼═©▀^äéČ╚Ą─ČÓéĆĘČć·Śl╝■Ż¼┐╔┤_Č©│÷ÅŚ╗╔äéČ╚į┌ØMūŃ╦∙ėąŚl╝■
Ž┬Ą─╚ĪųĄĘČć·ĪŻ─Ū├┤Ż¼į┌ė├ė┌£pšĖĪäėĮYśŗĄ─ÅŚ╗╔Ą─äéČ╚欫ö╠Äė┌įō╚ĪųĄĘČć·ā╚ĪŻ
łD5 £pšĖĪäėĮYśŗĄ─ŠC║ŽŚl╝■
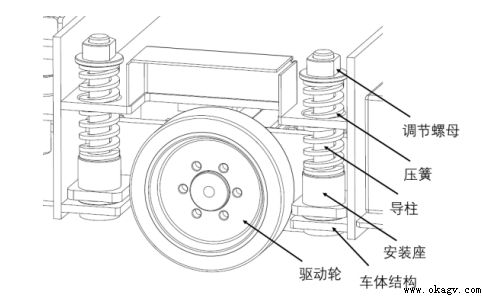
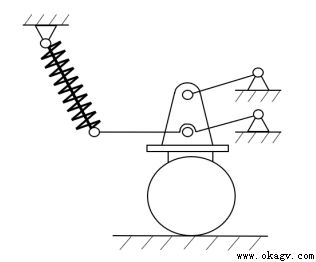
(1)ŃqĮėö[äė╩ĮĪŻŃqĮėö[äė╩ĮĖĪäėĮYśŗ╩Ūæ¬ė├▌^ČÓĄ─ę╗ĘN£pšĮYśŗŻ¼╚ńłD6╦∙╩ŠŻ¼“īäė▌å┼c░▓čbū∙╣╠Č©▓ó┼c▄ć¾wą╬│╔ŃqĮėŻ¼ät“īäėå╬į¬┼c▄ć¾wķg┐╔└@ŃqĮė³c1ą²▐Dö[äėŻ¼īŹ¼F╔ŽŽ┬ĘĮŽ“Ą─ĖĪäėĪŻ═©▀^į┌“īäėå╬į¬┼c▄ć¾wķgįOų├ÅŚ╗╔£pščbų├Ż¼└¹ė├ÅŚ╗╔┴”üĒøQČ©“īäėå╬į¬Ą─ö[äėĘ∙Č╚ĪŻ
łD6 ŃqĮėö[äė╩Įįö╝ÜĮYśŗłD
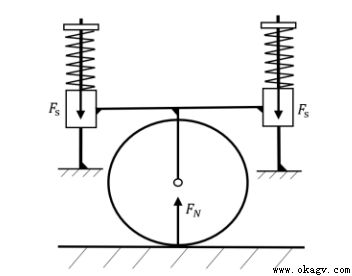
łD7 ŃqĮėö[äė╩ĮĮYśŗĄ─╩▄┴”łD
įōŅÉĮYśŗĄ─“īäė▌åų¦│ą┴”┼cÅŚ╗╔Ę┤┴”ķg┤µį┌┴”▒█Ą─ĻPŽĄ(╚ńłD7╦∙╩Š)Ż¼į┌ąĶę¬½@Ą├ę╗Č©Ą─“īäė▌åų¦│ą┴”Ž┬Ż¼īŹļHÅŚ╗╔╦∙ąĶĄ─ÅŚ┴”▒╚“īäė▌åų¦│ą┴”Ė³ąĪĪŻ╚╗Č°Ż¼ĖĪäė┴┐äé║├ŽÓĘ┤Ż¼į┌“īäėå╬į¬ąĶę¬½@Ą├ę╗Č©Ą─ĖĪäė┴┐ĢrŻ¼ÅŚ╗╔Ą─ē║┐s┴┐ąĶę¬▒╚“īäėå╬į¬ĖĪäė┴┐Ą─Ė³┤¾ĪŻ
╗∙ė┌╔Ž╩÷╠žąįŻ¼ŃqĮėö[äė╩ĮĖĪäėĮYśŗ▒╚▌^▀mė├ė┌┤¾▌d║╔Īó┐šķg│õūŃĄ─AGV▌åŽĄ▓╝Šų╔ŽĪŻ┴”▒█ėąą¦£pąĪÅŚ╗╔╦∙ąĶĄ─äéČ╚Ż¼Ą½ī”ö[äė┐šķgŠ▀ėąę╗Č©Ą─ę¬Ū¾ĪŻ
łD8 ŃqĮėö[äė╩ĮĮYśŗĄ─ļpŽ“▓Ņ«Éąį
«öAGVį┌Ų┬Ą└ųąąąū▀ĢrŻ¼ŲõŲ┬Ą└ĘĮŽ“╚ńłD8Ą─╔ŽłD╦∙╩ŠŻ¼Ųõ“īäė▌åų¦│ą┴”┼cö[äėŃqĮė³cķg┴”▒█ķLČ╚ŽÓ▒╚┴Ēę╗ĘĮŽ“Ż©łD8Ą─Ž┬łDŻ®Ą─ę¬Č╠ĪŻį┌ÅŚ╗╔Ą─ē║┐s┴┐ę╗Č©ĢrŻ¼╝┤ÅŚ╗╔Ę┤┴”ę╗Č©Ž┬Ż¼łD8╔ŽłDĄ─“īäė▌åų¦│ą┴”Ė³┤¾Ż¼į┌AGVžō▌d▌^┤¾ĢrŻ¼æ¬«öūóęŌ“×╦Ń“īäė▌å▌d║╔╩Ūʱ╠Äė┌Ņ~Č©ĘČć·ā╚ĪŻ
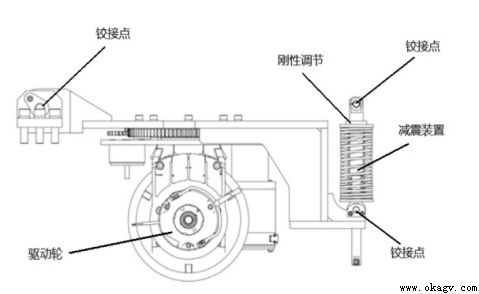
(2)┤╣ų▒ī¦ų∙╩ĮĪŻ┤╣ų▒ī¦ų∙╩ĮĖĪäėĮYśŗ╩Ū═©▀^“īäė▌å┼c░▓čbū∙╣╠Č©Ż¼░▓čbū∙ųąįOų├ėąī¦╠ū┼cī¦ŚUą╬│╔ęŲäėĖ▒Ż¼ī¦ŚU╔ŽįOų├ėąē║┴”ÅŚ╗╔Ą─ę╗ĘN£pšĮYśŗĪŻ“īäėå╬į¬═©▀^ī¦ų∙ī¦╠ūĖ▒īŹ¼F╔ŽŽ┬ĖĪäėŻ¼ē║┴”ÅŚ╗╔į┌┤╣ų▒ĘĮŽ“╔ŽĮo“īäėå╬į¬╠ß╣®žQų▒Ą─Ę┤┴”ĪŻ
łD9 ┤╣ų▒ī¦ų∙╩Įįö╝ÜĮYśŗłD
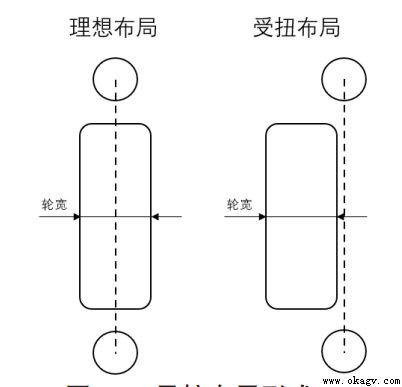
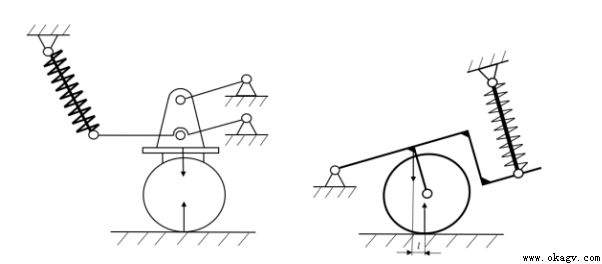
įōĮYśŗ欫ö║Ž└Ē▓╝ų├ī¦ų∙┼c“īäė▌åķgĄ─╬╗ų├ĻPŽĄŻ¼╚ńłD10╦∙╩ŠŻ¼×ķ▒▄├Ōę“┴”Ęų┼õ▓╗Š∙ä“Ą─įŁę“ī¦ų┬ī¦ų∙┼cī¦╠ūķg«a╔·┴”ŠžŻ¼æ¬īóā╔ī¦ų∙ŽÓī”“īäė▌åė|Ąž³cŠėųą▓╝ų├ĪŻ╚¶ī¦ų∙ø]ėąŠėųąĘ┼ų├Ż¼ā╔▀ģĄ─ÅŚ╗╔Ę┤┴”▓ó▓╗ŽÓĄ╚Ż¼įņ│╔Ę┤┴”▌^┤¾ę╗Č╦ē║┐s┴┐▌^ČÓŻ¼Ę┤┴”▌^ąĪę╗Č╦ē║┐s┴┐▌^ąĪŻ¼┤╦ĢrŻ¼ī¦ų∙┼cī¦╠ūķg▒ž╚╗Ģ■«a╔·┴”Šž╩╣ęŲäėĖ▒░l╔·┐©£■ĪŻ
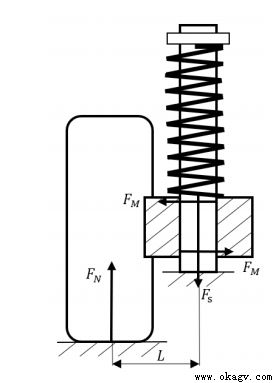
×ķ▀Mę╗▓ĮĘ└ų╣ī¦ų∙┼cī¦╠ūķg░l╔·┐©£■Ż¼╚ńłD11╦∙╩ŠŻ¼ā╔ī¦ų∙Ą─ųąą─▀BĮėŠĆæ¬╠Äė┌“īäė▌åīÆųąą─ĪŻ╚ńłD12╦∙╩ŠŻ¼«öā╔ī¦ų∙Ą─ųąą─▀BĮėŠĆŲ½ļx“īäė▌åīÆųąą─ĢrŻ¼“īäė▌åĄ─ų¦│ą┴”┼cÅŚ╗╔Ę┤┴”ķg┤µį┌┴”ŠžĄ─┴”▒█Ż¼į┌ī¦╠ū┼cī¦ų∙Ą─┼õ║Ž├µ╔Ž▒žČ©«a╔·ī”Ēö┴”Ż¼╩╣ęŲäėĖ▒░l╔·┐©£■ĪŻ
łD10 ┤╣ų▒ī¦ų∙╩ĮĮYśŗĄ─╩▄┴”łD
łD11 ī¦ų∙▓╝Šųą╬╩Į
łD12 ī¦ų∙Ų½ęŲĄ─╩▄┴”Ūķør
š¹¾wČ°čįŻ¼┤╣ų▒ī¦ų∙╩ĮĖĪäėĄ─ĮYśŗš╝ė├¾wĘe▌^ąĪĪóĮYśŗ║åå╬ĪŻÅ─│╔▒ŠĘĮ├µČ°čįŻ¼╩Ū▌^×ķĮøØ·Ą─ę╗ĘN£pšĮYśŗŻ¼▒╚▌^▀mė├ė┌ī”┐šķgŠ▀ėąŽ▐ųŲĄ─▌pųą▌d▌åŽĄ▓╝ŠųĪŻ
ī¦ų∙Ą─╩▄┼ż┐©£■╩ŪįōĮYśŗĄ─ŠųŽ▐³cŻ¼×ķĮŌøQįōå¢Ņ}Ż¼æ¬«ö║Ž└Ē▓╝Šųī¦ų∙┼c“īäė▌åĄ─ŽÓī”╬╗ų├ĻPŽĄĪŻį┌┤╦═¼ĢrŻ¼į÷╝ėī¦ų∙┼cī¦╠ūĄ─┼õ║ŽķLČ╚Ż¼┐╔ėąą¦£pąĪę“╩▄┼ż«a╔·Ą─ī”Ēö┴”Ż¼£pąĪī¦ų∙ī¦╠ūĄ─┐©£■Ė┼┬╩═ŌŻ¼▒▄├Ōī¦ų∙╩▄┼żÅØŪ·ūāą╬Ą─┐╔─▄ĪŻ
(3)╝¶▓µ╩ĮĪŻ╝¶▓µ╩ĮĖĪäėĮYśŗ╩Ū╗∙ė┌╝¶▓µ┼e╔²ĮYśŗ╦∙čė╔Ļ│÷üĒĄ─ę╗ĘN£pšĮYśŗĪŻŲõųą░³║¼┴╦╝¶▓µ╩Į┼e╔²ĮYśŗĄ─╔ŽŽ┬═ą╝▄Ż¼ųąķg═©▀^╝¶▓µ▀Mąą▀BĮė▓óį┌ā╔═ą╝▄ųąķgįOų├ėą£pšÅŚ╗╔ĪŻ
įōĮYśŗĄ─£pšĖĪäėą═╩Į┼c╝¶▓µ╩Į┼e╔²ŽÓ═¼Ż¼į┌ė÷ĄĮ┬Ę├µ▓╗ŲĮš¹ĢrŻ¼Ž┬═ą╝▄Ģ■┤╣ų▒Ž“╔Žē║┐s▓ó┐┐Į³╔Ž═ą╝▄Ż¼═¼ĢrŻ¼Ž┬═ą╝▄┼c╔Ž═ą╝▄ķg╦«ŲĮĘĮŽ“ę▓Ģ■░l╔·╬╗ęŲĪŻ
ė╔ė┌╝¶▓µĮYśŗį┌Ė▀Č╚┐šķgĄ─š╝ė├▌^┤¾Ż¼┤╦£pšĮYśŗĖ³ČÓĄ─╩Ū▀mė├ė┌▓Ņ╦┘å╬į¬─ŻēKĪŻŲõųąŻ¼╝¶▓µĮYśŗĄ─ųąķg▓┐ĘųĄ─┐šķg┐╔ęį▒╗ėąą¦└¹ė├Ż¼▓Ņ╦┘“īäė─ŻēKį┌░³║¼┬Ę├µ▀mæ¬╣”─▄═ŌŻ¼Ųõå╬į¬─ŻēK▀ĆŠ▀éõŽÓī”▄ć¾wą²▐DĄ─▐DŽ“╣”─▄ęį╠ßĖ▀AGVĄ─▐DŽ“ąį─▄ĪŻę“┤╦Ż¼ĻPė┌▐DŽ“Ą─ĮYśŗ═Ļ╚½┐╔ęįĘ┼ų├ė┌╝¶▓µĮYśŗĄ─ųąķg┐šķgŻ¼ęį╩╣Ą├į┌Š▀éõ£pšęį╝░▐DŽ“╣”─▄Ą─═¼Ģr╣Ø╩ĪĖ³ČÓĄ─┐šķgĪŻ
łD13 ╝¶▓µ╩ĮĖĪäėįö╝ÜĮYśŗłD
łD14 ╝¶▓µ╩ĮĖĪäėįö╝ÜĮYśŗłD
╝¶▓µ╩ĮĖĪäėĮYśŗš¹¾wŽÓī”£pš─ŻēKČ°čį¾wĘeš╝ė├▌^┤¾Ż¼ŲõĖ³ČÓ╩Ū┼c▓Ņ╦┘▐DŽ“ĮYśŗŽÓĮY║ŽŻ¼īóā╔š▀ĮYśŗ┐šķg║Ž▓óĪŻŲõĮYśŗ▓╗▀mė├ė┌ī”┐šķgę¬Ū¾▌^Ė▀ęį╝░Ħėą▐DŽ“╣”─▄Ą─ȵ▌å▓╝ŠųĪŻ
į┌┬Ę├µ▀mæ¬ąįųąŻ¼╝¶▓µ╩ĮĮYśŗŠ▀ėąę╗Č©Ą─ŠųŽ▐ąįĪŻ╚ńłD14╦∙╩ŠŻ¼«öā╔“īäė▌åĄ─┬Ę├µĖ▀Č╚▓╗ę╗ų┬ĢrŻ¼ė╔ė┌╝¶▓µĮYśŗ▓óø]ėąĖ³ČÓĄ─ūįė╔Č╚üĒ▀mæ¬ā╔é╚Ą─Ė▀Č╚▓╗ŲĮŻ¼ät╩╣AGVš¹¾w▒╗āAą▒ĄžĒöŲĪŻ
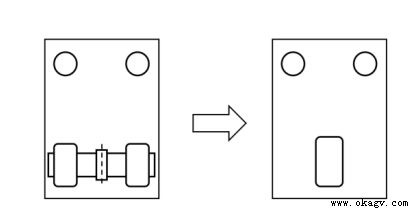
(4)ö[äėś“╩ĮĪŻö[äėś“╩ĮĮYśŗ═©▀^š¹ś“╩Įīóā╔éĆ▌åūė▀BĮėŲüĒŻ¼ęįś“Ą─ųąą─ū„×ķö[äėųąą─┼c▄ć¾wŃqĮėĪŻö[äėś“╩ĮĄ─┬Ę├µ▀mæ¬ĮYśŗ│ŻęŖė┌čb▌dÖCęį╝░ŽÓĻPĄ─╣ż│╠ÖCąĄųąŻ¼═©▀^ßīĘ┼š¹ś“Ą─ą²▐Dūįė╔Č╚üĒ▀mæ¬Ąž├µĄ─▓╗ŲĮš¹ĪŻÅŚ╗╔į┌įōĮYśŗųąų„ę¬ŲĄĮ┴╦£pŠÅø_ō¶Ą─ū„ė├Ż¼į┌īŹļHĄ─æ¬ė├ųąŻ¼╚¶┬Ę├µāHāHų╗╩Ū▓╗ŲĮš¹Č°ø]ėąĮo“īäėå╬į¬Ä¦üĒĖ³ČÓĄ─ø_ō¶Ż¼ö[äėś“╩ĮĄ─ĖĪäėĮYśŗ┐╔ęį¤oĒÜįOų├ÅŚ╗╔ĪŻĄžą╬Ą─▓╗ŲĮš¹╩╣Ą├ā╔▌åĄ─ų¦│ą┴”ļxö[äėųąą─Ą─ŠÓļx▓╗ę╗śėŻ¼ät┴”▒█▌^▀hĄ─▌åūėų¦│ą┴”ąĪŻ¼┴”▒█▌^Č╠Ą─▌åūėų¦│ą┴”┤¾Ż¼ĖĪäėĮYśŗė╔┤╦üĒ▀mæ¬┬Ę├µĄ─▓╗ŲĮĪŻ
ī”ė┌ę╗éĆö[äėś“ĮYśŗČ°čįŻ¼ā╔éĆ▌åūė╩╝ĮK═©▀^ö[äė▀mæ¬▓╗ŲĮ┬Ę├µŻ¼īŹļH┐╔ęĢ×ķīóś“╔Žā╔éĆ▌åūėūā╗»×ķš¹ś“Ą─1éĆ┤¾▌åūėĪŻ─Ū├┤Ż¼ī”ė┌ö[äėś“╩ĮĄ─╦─▌å▓╝ŠųüĒšfŻ©łD 16╦∙╩ŠŻ®Ż¼╝┤īó╦─▌å▓╝Šųūā╗»×ķ╚²▌å▓╝ŠųŻ¼į┌╚²³c┤_Č©ę╗éĆŲĮ├µĄ─└Ēšō╔ŽŻ¼╚²éĆ▌åūė▒ž╚╗ĮėĄžŻ¼Å─Č°ĮŌøQ┴╦╦∙ėą▌åūė╣▓═¼ų°ĄžĄ─å¢Ņ}ĪŻ
łD15 ö[äėś“╩ĮĖĪäėĮYśŗ║åłD
łD16 ö[äėś“Ą─▌åŽĄč▌ūā
ī”ė┌┴∙▌å▓╝ŠųĄ╚ČÓ▌åŽĄ▓╝ŠųŻ¼═©▀^ö[äėś“╩ĮĮYśŗīŹ¼F┬Ę├µ▀mæ¬ätąĶę¬įOų├Ė³ČÓĮMĄ─ö[äėś“ĪŻė╔╔Ž╩÷Ęų╬÷Ż¼ę╗éĆö[äėś“┐╔ęĢ×ķīóā╔éĆ▌åūėūā╗»×ķ1éĆ▌åūėĪŻė╔ė┌╚²
▌å▒žČ©ĮėĄžŻ¼┴∙▌å▓╝ŠųĒÜīó┴∙▌åūā╗»×ķ╚²▌åŻ¼╝┤ąĶę¬3ĮMö[äėś“ĮYśŗĪŻ
łD17 ö[äėś“ĮYśŗŠ▀¾wæ¬ė├
Ż©5Ż®╦─▀ģą╬╩ĮĪŻ╦─▀ģą╬╩ĮĖĪäėĮYśŗ╩Ū╗∙ė┌╦─▀BŚUĄ─ö[äėįŁ└ĒŻ¼į┌Ųõ╗∙ĄA╔Žį÷╝ė£pšÅŚ╗╔Ż¼╩╣ŲõĮYśŗö[äėĢrē║┐s£pšÅŚ╗╔Č°īŹ¼FĄ─£pšą¦╣¹ĪŻ
╦─▀ģą╬╩ĮĖĪäėĮYśŗĄ─£pšą═╩Į▒╚▌^ŅÉ╦Ųė┌ŃqĮėö[äė╩ĮĖĪäėĮYśŗŻ¼ā╔š▀Š∙╩Ū═©▀^└@ų°ŃqĮė³cą²▐DüĒē║┐s£pšÅŚ╗╔Å─Č°ŲĄĮ£pšą¦╣¹Ż¼╚╗Č°Ż¼▀@ā╔š▀į┌▀\äėĮYśŗęį╝░╩▄┴”╔Ž▓╗╚½ŽÓ═¼ĪŻ
łD18 ╦─▀ģą╬╩ĮĖĪäėĮYśŗ║åłD
╚ńłD19 ╦∙╩ŠŻ¼╦─▀ģą╬╩ĮĖĪäėĮYśŗĄ─╔ŽŽ┬ĖĪäėĘĮ╩Į╩Ū╦─▀BŚUÖCśŗĄ─ö[äėįŁ└ĒŻ¼Č°ŃqĮėö[äė╩ĮĖĪäėĮYśŗĄ─╔ŽŽ┬ĖĪäėĘĮ╩Į╩Ū└@ŃqĮė³cū„łAų▄▀\äėĄ─įŁ└ĒĪŻ
łD19 ╦─▀ģą╬╩Į┼cŃqĮėö[äė╩ĮĄ─╩▄┴”ī”▒╚
╦─▀BŚUĄ─ö[äėįŁ└Ē┐╔īŹ¼F“īäėå╬į¬į┌ĖĪäėĢrŲõū╦æB▓╗Ģ■░l╔·Ė─ūāŻ¼Č°ŃqĮėö[äė╩ĮĮYśŗĄ─“īäėå╬į¬į┌ĖĪäė▀^│╠ŲõāAĮŪĢ■ųØuūā╗»ĪŻāAĮŪĄ─ūā╗»╩╣Ą├“īäė▌åĄ─ų¦│ą┴”┼c░▓čbū∙Ą─ų¦Ę┤┴”ķg«a╔·┴”▒█Ż¼Å─Č°╩╣“īäėå╬į¬╩▄┼żĪŻ
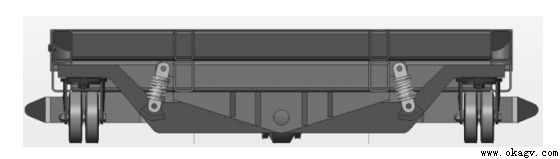
▒Ē1 AGV│ŻęŖ£pšĖĪäėĮYśŗ╠ž³cĘų╬÷
╦─▀ģą╬╩ĮĖĪäėĮYśŗį┌ĖĪäė▀^│╠ųąū╦æB▓╗Ģ■░l╔·Ė─ūāŻ¼Ųõ“īäėå╬į¬┼c░▓čbū∙ķgĄ─┴”╩╝ĮK╣▓ŠĆĪŻ
╦─▀ģą╬╩ĮĖĪäėĮYśŗī”žQų▒ĘĮŽ“Ą─┐šķgę¬Ū¾▌^┤¾Ż¼ŲõĮYśŗŽÓ▒╚ŃqĮėö[äė╩ĮĮYśŗÅ═ļsŻ¼┤╦ŅÉĮYśŗę╗░Ńæ¬ė├ė┌▓µ▄ć╩Į AGV Ą─┴ó╩Įȵ▌åęį╝░▓Ņ╦┘“īäėųąĪŻ
ī”AGV│ŻęŖĄ─£pšĖĪäėĮYśŗ╠ž³cĘų╬÷ęŖė┌▒Ē1ĪŻÅ──┐Ū░ć°ā╚Ą─ AGV £pšą═╩ĮüĒ┐┤Ż¼┤¾▌dųžĄ─ȵ▌å▓╝ŠųĖ³ČÓĄ─╩Ū▓╔ė├ŃqĮėö[äė╩ĮĖĪäėĮYśŗŻ¼ī”ė┌▌dųž▌^×ķąĪĄ─ȵ▌å▓╝Šųät▓╔ė├┤╣ų▒ī¦ų∙╩ĮĮYśŗĪŻī”ė┌▓Ņ╦┘“īäėŻ¼ī”ė┌┬Ę├µ▀mæ¬ąįę¬Ū¾▌^Ė▀Ą─▓╝Šųę╗░Ń▓╔ė├¬Ü┴óæęÆņĄ─£pšą═╩ĮŻ¼Ųõ░³└©┴╦ŃqĮėö[äė╩ĮĪó┤╣ų▒ī¦ų∙╩ĮĪó╦─▀ģą╬╩ĮĪŻ
AGVĄ─ų„ę¬▌åŽĄ▓╝Šų░³║¼▓Ņ╦┘▓╝Šų║═ȵ▌å▓╝ŠųŻ¼ßśī”Ųõ▓╝ŠųĄ─ą═╩Į▓╗═¼Ż¼Ųõ£pšĄ─ĮYśŗĘĮ╩Įę▓欫öĘų╬÷Ųõė░ĒæĄ─▌pųžĪŻ
ģó┐╝╬─½IŻ║
[1] īOĮ©├± . ╣ż│╠▄ć▌v£pšŽĄĮyĄ─ĻPµI╝╝ąg╠Įėæ[J]. ų■┬ĘÖCąĄ┼c╩®╣żÖCąĄ╗» ,2011,(6):80-82.
[2] ±RįĮ , ═§ė└Č„ , ±RŅŻ . ųž▌d AGV ÖCąĄĮYśŗįOėŗ[J]. ÖCąĄčąŠ┐┼cæ¬ė├ ,2018(2).
[3] ģ╬═§▒ļ , äóĻ╗ , ģŪė└║Ż . ĖĪäė╩Į“īäėčbų├╝░AGV[P]. ║╝ų▌Ż║CN207257828U,2018-04-20.
[4] ų▄š²▄Ŗ , äóŲõą┼ , ▒R▌x╬─ . ę╗ĘNūįäėī¦║Į▄ćĄ─“īäėæęÆņčbų├╝░ūįäėī¦║Į▄ć[P]. ÅV¢|Ż║CN106494257AŻ¼2017-03-15.
[5] ┼Ē╚A├„ , ųņųę , ┼ĒŪÕ╚A , ▓▄ŅŻ .AGV ȵ▌å“īäė£pšÖCśŗ║═AGVȵ▌å“īäėčbų├[P]. ÅV¢|Ż║CN206327106UŻ¼2017-07-14.
[6] ┌w╚A¢| , ąņę╗┤Õ .AGV ╝¶ĄČ▓µ╩Į£pšå╬į¬ą²▐DŽ▐╬╗ÖCśŗ[P]. ÅV¢|Ż║CN206187160UŻ¼2017-05-24.╬─š┬üĒį┤ė┌AGV░╔
╔Žę╗ŚlŻ║AGVųŪ─▄é}ā”ÖCŲ„╚╦ĮYśŗā×╗»įOėŗ Ž┬ę╗ŚlŻ║AGVūįė╔┬ĘÅĮī¦ę²ĮķĮB
ļŖįÆŻ║0755-29851810
é„šµŻ║0755-27307147
Q QŻ║2448209188
Ó]ŽõŻ║zfj@okagv.com
ĄžųĘŻ║╔Ņ█┌╩ąīÜ░▓ģ^ĖŻ║ŻĮųĄ└┤¾č¾┬Ęųą╝ZĖŻ░▓ÖCŲ„╚╦┐Ų╝╝ł@14ŚØ

Copyright © 2012-2023 ╔Ņ█┌╩ąÜWµzųŪ─▄ÖCŲ„╚╦╣╔Ę▌ėąŽ▐╣½╦Š ░µÖÓ╦∙ėąĪĪ ╗øICPéõ 19115608 ╠¢ĪĪxml sitemap
┬ōŽĄļŖįÆ
400-007-3860QQū╔įā
2448209188╬óą┼
╬óą┼ū╔įā