ÜgėŁ▀M╚ļ╔Ņ█┌╩ąÜWµzųŪ─▄ÖCŲ„╚╦╣╔Ę▌ėąŽ▐╣½╦ŠŠW(w©Żng)šŠŻĪ
īŻśI(y©©)╠ß╣®é}ā”╬’┴„╔²╝ēĖ─įņĪó¤o╚╦░ß▀\ÖCŲ„╚╦«a(ch©Żn)ŲĘ
ę╗╝ęīŻūóÅ═(f©┤)║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░l(f©Ī)ųŲįņć°╝ęĖ▀ą┬╝╝ąg(sh©┤)Ų¾śI(y©©)
╚½ć°Ę■äš(w©┤)¤ßŠĆ 400-007-3860
ę╗╝ęīŻūóÅ═(f©┤)║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░l(f©Ī)ųŲįņć°╝ęĖ▀ą┬╝╝ąg(sh©┤)Ų¾śI(y©©)
╚½ć°Ę■äš(w©┤)¤ßŠĆ 400-007-3860

║ŽÖCŲ„╚╦")



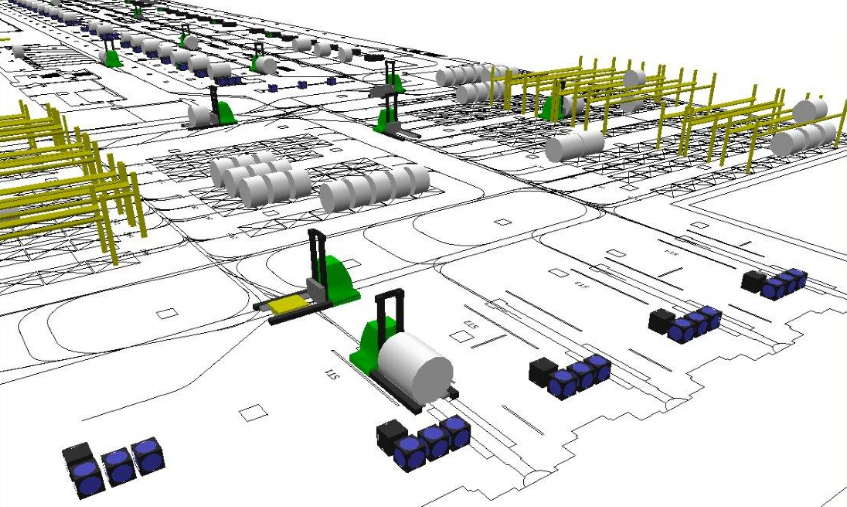
AGVąĪ▄ć┬ĘÅĮęÄ(gu©®)äØųŪ─▄š{(di©żo)┐žŽĄĮy(t©»ng)Ż╗ģ^(q©▒)ė“äØĘų─ŻēKė├ė┌īó╣żū„ģ^(q©▒)äØĘų×ķxéĆÖz£yģ^(q©▒)ė“▓óįO(sh©©)ų├═Ż┐┐³cŻ╗╚╬äš(w©┤)┤µā”─ŻēKė├ė┌īó░l(f©Ī)╦═ų┴AGVąĪ▄ćĄ─▀\▌ö╚╬äš(w©┤)┼cī”æ¬(y©®ng)Ą─AGVąĪ▄ćĄ─īŹĢr╬╗ų├ĻP(gu©Īn)┬ō(li©ón)▓ó┤µā”Ż╗ą┼Žó½@╚Ī─ŻēKė├ė┌▓╔╝»├┐ę╗éĆÖz£yģ^(q©▒)ė“ā╚(n©©i)▀\ąąĄ─AGVąĪ▄ćĄ─öĄ(sh©┤)┴┐Īó▀\▌ö╚╬äš(w©┤)Ą─éĆöĄ(sh©┤)ęį╝░▀\ąą┬ĘÅĮĄ─ķLČ╚Ż╗ųŪ─▄š{(di©żo)┐ž─ŻēK,ė├ė┌į┌╚╬ę╗éĆÖz£yģ^(q©▒)ė“ā╚(n©©i)▀\ąąĄ─AGVąĪ▄ćĄ─öĄ(sh©┤)┴┐│¼▀^ŅA(y©┤)įO(sh©©)öĄ(sh©┤)┴┐ĢrĖ∙ō■(j©┤)▀\ąąĄ─AGVąĪ▄ćĄ─▀\▌ö╚╬äš(w©┤)Ą─éĆöĄ(sh©┤)ęį╝░▀\ąą┬ĘÅĮĄ─ķLČ╚š{(di©żo)š¹įōÖz£yģ^(q©▒)ė“ā╚(n©©i)▀\ąąĄ─AGVąĪ▄ć╩Ūʱ▀M╚ļī”æ¬(y©®ng)Ą─═Ż┐┐³cĪŻ═©▀^Ęų╬÷AGVąĪ▄ć▀\▌ö╚╬äš(w©┤)éĆöĄ(sh©┤)Īó▀\ąą┬ĘÅĮĄ─ķLČ╚üĒ┼ąöÓŲõ╚╬äš(w©┤)Ą─Šo╝▒ąį║═▀\ąąĢrķg╩Ūʱ│õūŃ,ęįš{(di©żo)š¹╣żū„ģ^(q©▒)ā╚(n©©i)AGVąĪ▄ćĄ─ąą▀M║══Ż┐┐ĀŅæB(t©żi),▒ŻūCŲõĄ─▀\ąąą¦┬╩║═╣żū„ą¦┬╩ĪŻ
├┐ę╗éĆÖz£yģ^(q©▒)ė“įO(sh©©)ų├═Ż┐┐³cŻ╗╚╬äš(w©┤)┤µā”─ŻēK,ė├ė┌Įė╩šŽ“xéĆÖz£yģ^(q©▒)ė“ā╚(n©©i)Ą─AGVąĪ▄ćŽ┬░l(f©Ī)Ą─▀\▌ö╚╬äš(w©┤),Ūęīó├┐ę╗éĆ▀\▌ö╚╬äš(w©┤)┼cī”æ¬(y©®ng)Ą─AGVąĪ▄ćĄ─īŹĢr╬╗ų├ĻP(gu©Īn)┬ō(li©ón)▓ó┤µā”Ż╗ą┼Žó½@╚Ī─ŻēK,ė├ė┌▓╔╝»├┐ę╗éĆÖz£yģ^(q©▒)ė“ā╚(n©©i)▀\ąąĄ─AGVąĪ▄ćĄ─öĄ(sh©┤)┴┐,▓ó½@╚Ī├┐ę╗éĆÖz£yģ^(q©▒)ė“ā╚(n©©i)▀\ąąĄ─AGVąĪ▄ćĄ─▀\▌ö╚╬äš(w©┤)Ą─éĆöĄ(sh©┤)ęį╝░▀\ąą┬ĘÅĮĄ─ķLČ╚Ż╗ųŪ─▄š{(di©żo)┐ž─ŻēK,ė├ė┌½@╚ĪxéĆÖz£yģ^(q©▒)ė“ā╚(n©©i)▀\ąąĄ─AGVąĪ▄ćĄ─öĄ(sh©┤)┴┐Īó▀\ąąĄ─AGVąĪ▄ćĄ─▀\▌ö╚╬äš(w©┤)Ą─éĆöĄ(sh©┤)ęį╝░▀\ąą┬ĘÅĮĄ─ķLČ╚,▓óį┌╚╬ę╗éĆÖz£yģ^(q©▒)ė“ā╚(n©©i)▀\ąąĄ─AGVąĪ▄ćĄ─öĄ(sh©┤)┴┐│¼▀^ŅA(y©┤)įO(sh©©)öĄ(sh©┤)┴┐ĢrĖ∙ō■(j©┤)▀\ąąĄ─AGVąĪ▄ćĄ─▀\▌ö╚╬äš(w©┤)Ą─éĆöĄ(sh©┤)ęį╝░▀\ąą┬ĘÅĮĄ─ķLČ╚š{(di©żo)š¹įōÖz£yģ^(q©▒)ė“ā╚(n©©i)▀\ąąĄ─AGVąĪ▄ć╩Ūʱ▀M╚ļī”æ¬(y©®ng)Ą─═Ż┐┐³cĪŻ
╔Žę╗ŚlŻ║AGVųŪ─▄▄ćĄ─▄ē█Eą┼Žó╠Ä└Ē┐žųŲĘĮĘ© Ž┬ę╗ŚlŻ║ų„Å─ę╗¾w╩Į▌åĮMĄ─AGVĄū▒PįO(sh©©)ėŗ
ļŖįÆŻ║0755-29851810
é„šµŻ║0755-27307147
Q QŻ║2448209188
Ó]ŽõŻ║zfj@okagv.com
ĄžųĘŻ║╔Ņ█┌╩ąīÜ░▓ģ^(q©▒)ĖŻ║ŻĮųĄ└┤¾č¾┬Ęųą╝ZĖŻ░▓ÖCŲ„╚╦┐Ų╝╝ł@14ŚØ

Copyright © 2012-2023 ╔Ņ█┌╩ąÜWµzųŪ─▄ÖCŲ„╚╦╣╔Ę▌ėąŽ▐╣½╦Š ░µÖÓ(qu©ón)╦∙ėąĪĪ ╗øICPéõ 19115608 ╠¢ĪĪxml sitemap
┬ō(li©ón)ŽĄļŖįÆ
400-007-3860QQū╔įā
2448209188╬óą┼
╬óą┼ū╔įā