īŻśI╠ß╣®é}ā”╬’┴„╔²╝ēĖ─įņĪó¤o╚╦░ß▀\ÖCŲ„╚╦«aŲĘ
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860





1 ę²čį
ūįäėī¦ę²▄ć(AGV-Automated Guided Vehicle)╩Ū¼F┤·ųŲįņŲ¾śI╝░╬’┴„ŽĄĮyųąĄ─ųžę¬įOéõŻ¼╩Ūę╗ĘNęį╬ó┐žųŲ╠Ä└ĒŲ„×ķ║╦ą─Ż¼ęįąŅļŖ│ž×ķäė┴”Ż¼čbėąĘŪĮėė|ī¦Ž“čbų├Ą─¤o╚╦±{±éūįäėī¦Ž“▀\▌d▄ćĪŻ╦³┐╔ęį░┤šš▒O┐žŽĄĮyŽ┬▀_Ą─├³┴ŅŻ¼Ė∙ō■ŅAŽ╚įOėŗĄ─│╠ą“Ż¼ę└šš▄ć▌dé„ĖąŲ„┤_Č©Ą─╬╗ų├ą┼ŽóŻ¼čžų°ęÄČ©Ą─ąą±é┬ĘŠĆ║══Ż┐┐╬╗ų├ūįäė±{±éĪŻAGVŠ▀ėą▀\▌öą¦┬╩Ė▀Īó╣Ø─▄Īó╣żū„┐╔┐┐Īó¤o╣½║”Īó╚ßąį▌ö╦═Ą╚ā׳cŻ¼ęčÅVĘ║æ¬ė├ė┌įSČÓŅIė“ĪŻÅ─│¼╝ē╩ął÷Īó▄ćķgöUš╣ĄĮ┤¾ą═ūįäė╗»é}ÄņĪóßtį║╝░┼õ╦═ųąą─Ż¼AGV│╔×ķ╣żśIūįäė╗»Ą─ų„꬜╦ųŠų«ę╗ĪŻ▒Š╬─└¹ė├┐sąĪ▒╚└²Ą──Żą═▄ć─ŻöMīŹļH╔·«aŠĆ╔ŽĄ─AGVŻ¼▓ó▓╔ė├╝t═Ōé„ĖąŲ„╝╝ągę²ī¦AGVęŲäėĪŻ
2ė▓╝■ŽĄĮyįOėŗ
2.1š¹¾wįOėŗ
ĪĪĪĪūįäėī¦ę²▄ć░³└©▄ć¾wĪó┐žųŲŲ„Īóé„ĖąŲ„║═äė┴”čbų├Ą╚4▓┐ĘųĪŻŲõųąŻ¼▄ć¾w▓╔ė├┐sąĪ▒╚└²Ą─200 mmĪ┴300 mmĪóĦėą▓Ņ╦┘Ų„Ą─║¾▌å“īäė─Żą═▄ć─ŻöMĪŻ┐žųŲŲ„╩Ūęįå╬Ų¼ÖCMC9S12DG128×ķ║╦ą─Ż¼┼õ║Ž▄ć¾w╔ŽĄ─é„ĖąŲ„║═äė┴”čbų├ęį┐žųŲAGVĘĆČ©▀\ąąĪŻé„ĖąŲ„ė╔£yŽ“Ą─╝t═Ōé„ĖąŲ„║═£y╦┘Ą─╗¶Ā¢é„ĖąŲ„ĮM│╔ĪŻäė┴”čbų├╩Ūė╔ąŅļŖ│ž“īäėĄ─ų▒┴„ļŖÖC║═ȵÖCśŗ│╔Ż¼Ęųäe┐žųŲ╦┘Č╚║═▐DŽ“ĪŻ▀@4▓┐Ęų┼õęįŽÓæ¬Ą─“īäėļŖ┬ĘŻ¼─▄ūįų„ūRäe┬ĘÅĮŻ¼┐žųŲ─Żą═▄ćĘĆČ©▀\ąąĪŻAGV─Żą═▄ć╚ńłD1╦∙╩ŠĪŻ
ĪĪ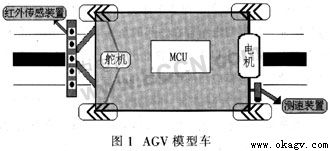
ĪĪ ĪĪAGV┼cMCU┐╔ęį┐┤│╔ę╗éĆūįäė┐žųŲŽĄĮyŻ¼╩Ūė╔é„ĖąŲ„Īóą┼Žó╠Ä└ĒĪó┐žųŲ╦ŃĘ©Īół╠ąąÖCśŗ4▓┐ĘųĮM│╔ĪŻŲõė▓╝■▓┐Ęų╩Ūęįå╬Ų¼ÖC×ķ║╦ą─Ż¼┼õėąé„ĖąŲ„Īół╠ąąÖCśŗęį╝░ŽÓæ¬Ą─“īäėļŖ┬Ęśŗ│╔┐žųŲŽĄĮyŻ╗ą┼Žó╠Ä└Ē┼c┐žųŲ╦ŃĘ©ätė╔┐žųŲ▄ø╝■═Ļ│╔ĪŻłD2╦∙╩Š╩Ūė▓╝■ŽĄĮyļŖ┬Ę┐“łDĪŻ
ĪĪ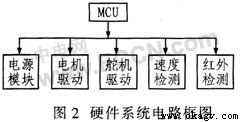
2.2 MCUĮķĮB
ĪĪĪĪ AGV▓╔ė├MC9S12DGl28ū„×ķŽĄĮy┐žųŲŲ„Ż¼įōŲ„╝■ā╚ų├128 KBĄ─FlashĪó8 KBĄ─RAMĪó2 KBĄ─EEPROMŻ¼8éĆ▌ö╚╦▓ČūĮ║═▌ö│÷▒╚▌^═©Ą└Ż¼2éĆ8╬╗╗“16╬╗├}ø_└█╝ėŲ„Ż¼8┬ĘPWM▓©«a╔·═©Ą└Ż¼8┬Ę10╬╗ADC═©Ą└╗“16┬Ę8╬╗ADC═©Ą└Ż¼2 éĆSCIĪóSPI═©ą┼Įė┐┌Ż¼80Ī½112éĆ┐╔ŠÄ│╠IŻ»OČ╦┐┌ĪŻ
2.3ļŖį┤─ŻēK
ĪĪĪĪ AGV─Żą═▄ćĄ─äė┴”ė╔7.2 VŻ¼2 AŻ»hąŅļŖ│ž╠ß╣®ĪŻė╔ė┌ļŖ┬ĘųąĄ─▓╗═¼─ŻēK╦∙ąĶĄ─╣żū„ļŖē║ĪóļŖ┴„Ė„▓╗ŽÓ═¼Ż¼ę“┤╦ąĶę¬ČÓéĆĘĆē║ļŖ┬ĘīóļŖ│žļŖē║▐D╗»×ķĖ„─ŻēK╦∙ąĶļŖē║ĪŻLM7805╩Ū┤«┬ōĘĆē║Ų„Ż¼▌ö│÷ļŖē║×ķ5 VŻ¼ų„ę¬×ķå╬Ų¼ÖCĪó╝t═Ōé„ĖąŲ„Īó╦┘Č╚é„ĖąŲ„╝░▓┐ĘųĮė┐┌ļŖ┬Ę╠ß╣®ļŖį┤ĪŻČ°LM1117-ADJ▌ö│÷×ķ2.85 VĪ½6 V┐╔š{ĘĆē║ļŖį┤Ż«═©▀^ļŖ╬╗Ų„š{╣Øų┴6 VļŖē║×ķȵÖC╣®ļŖĪŻąŅļŖ│ž7.2 VļŖį┤ų▒Įė×ķACV─Żą═▄ć║¾▌åļŖÖC╣®ļŖĪŻ
2.4╦┘Č╚Öz£y─ŻēK
ĪĪĪĪ ╦┘Č╚é„ĖąŲ„╩╣ė├CS3020ą═╗¶Ā¢į¬╝■ĪŻ╗¶Ā¢į¬╝■╩╣ė├ĘĮ▒ŃŻ¼ų╗ąĶę╗ų╗╔Ž└ŁļŖūĶīó▌ö│÷Įėų┴ļŖį┤╝┤┐╔š²│Ż╣żū„ĪŻį┌▌å╠źā╚é╚š│╔Ž4éĆ┤┼õōŻ¼į┌┤┼õōš²ī”ĘĮŽ“▀xō±║Ž▀mĄžĘĮ╣╠Č©╗¶Ā¢į¬╝■ĪŻ«ö▌å╠ź├┐▐Däėę╗╚”Ż¼╗¶Ā¢į¬╝■▌ö│÷4éĆą┼╠¢Ż¼▌å╠źų▄ķL×ķ17 cmŻ¼╦∙ęį├┐ā╔éĆą┼╠¢Ģrķg▓Ņ×ķTŻ¼AGVąą±é4.25 cmĪŻ═©▀^£y┴┐TŻ¼ėŗ╦ŃAGVĄ─╦┘Č╚V=4.5 cmŻ»TĪŻ
2.5╝t═ŌÖz£y─ŻēK
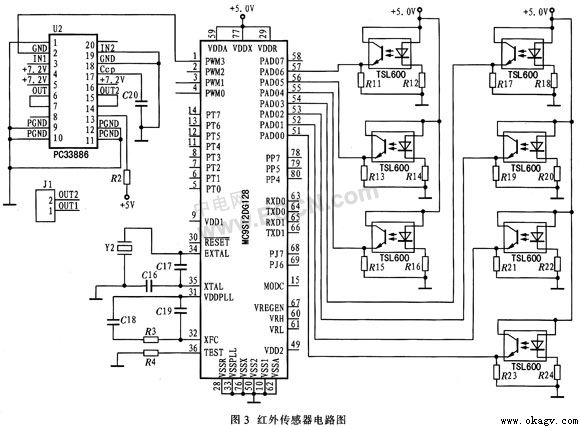
ĪĪĪĪ AGV─Żą═▄ćĄ─ę²ī¦ĘĮ╩Į×ķ│¼┬Ģ▓©ę²ī¦ĪóļŖ┤┼Ėąæ¬ę²ī¦ĪółDŽ±ūRäeę²ī¦ĪóæTąįī¦║ĮĪó╝t═Ōé„ĖąŲ„ę²ī¦Ą╚ĪŻė╔ė┌╝t═Ōé„ĖąŲ„╩╣ė├ĘĮ▒ŃĪóārĖ±Ą═┴«Īóę²ī¦Š½┤_ĪóĒææ¬╦┘Č╚┐ņĄ╚ā׳cŻ¼ę“┤╦▒ŠŽĄĮyįOėŗ▓╔ė├╝t═Ōé„ĖąŲ„╝╝ągę²ī¦AGV─Żą═▄ćąą±éĪŻ▀xė├░l╔õ╣”┬╩┤¾ĪóĮė╩šņ`├¶Č╚Ė▀Ą─╝t═Ōé„ĖąŲ„╩Ū▒ŻūC╝t═ŌÖz£yļŖ┬Ę┐╔┐┐╣żū„Ą─╗∙ĄAĪŻ▒ŠŽĄĮyįOėŗĄ─╝t═Ōé„ĖąŲ„▀xė├Ę┤╔õ╩Į╣ŌļŖ╣▄TSL600ĪŻ╚ńłD3╦∙╩ŠŻ¼ėę▀ģ╩Ū╝t═Ō░l╣ŌČ■śO╣▄║═╝t═ŌĮė╩š╚²śO╣▄Ż¼ŲõųąŻ¼VCC×ķ+5 VŻ¼Č°R1=510 ”Ė║═R2=20 k”Ė×ķŽ▐┴„ļŖūĶŻ¼OUT×ķ▌ö│÷ą┼╠¢ĪŻ╝t═Ō░l╣ŌČ■śO╣▄░l╔õĄ─╝t═Ō╣ŌĖ∙ō■Ę┤╔õĮķ┘|╔½▓╩Ą─╔Ņ£\Ę┤╔õĄĮĮė╩š╚²śO╣▄Ą─╣Ō┴┐▓╗═¼ĪŻĮė╩š╚²śO╣▄╩Ūę╗ĘN╣Ō├¶╚²śO╣▄Ż¼Įė╩šĄĮĄ─╣Ō┴┐įĮČÓŻ¼▌ö│÷Ą─ļŖ┴„įĮ┤¾ĪŻ▒ŠįOėŗį┌AGV─Żą═▄ćŪ░10 cm╠ÄÖMŽ“░▓čb7ī”╝t═Ōé„ĖąŲ„Ż¼AGVųą▌SĘĮŽ“╔Ž░▓čb1ī”Ż¼ųą▌Sū¾Īóėęā╔é╚Ė„░▓čb3ī”ĪŻĖ∙ō■7ī”é„ĖąŲ„▌ö│÷Ą─ą┼╠¢Ż¼┼ąöÓ║┌╔½ę²ī¦ŠĆ║═AGV─Żą═▄ćĄ─╬╗ų├ĻPŽĄŻ¼×ķę²ī¦▐DŽ“╠ß╣®┐╔┐┐Ą─öĄō■ĪŻ╝t═ŌĮė╩š╣▄Įė╩šĄ└┬ĘĘ┤╔õĄ─╝t═Ō╣Ō«a╔·ūā╗»Ą─ļŖē║Ż¼Ę┤ė│┘ÉĄ└ųąą─ŠĆĄ─╬╗ų├ĪŻ╝t═Ōé„ĖąŲ„▌ö│÷┴┐×ķ─ŻöM┴┐Ż¼═©▀^ MCUĄ─ADCīó─ŻöM┴┐▐DōQ×ķöĄūų┴┐Ż¼▓╗āH║å╗»═Ō▓┐ļŖ┬ĘįOėŗŻ¼═¼Ģr▒Ż┴¶╝t═ŌĮė╩š╣▄Ą─▀B└mūā╗»ļŖē║ą┼ŽóŻ¼═©▀^▄ø╝■╦ŃĘ©Ą├ĄĮĖ³Š½┤_Ą─╬╗ų├ą┼Žó▓óŽ¹│²ŁhŠ│╣ŌŠĆĄ─ė░ĒæĪŻMC9S12DG128ėą8┬Ę10╬╗ADC╗“16┬Ę8╬╗ADCŻ¼┐╝æ]ĄĮ8╬╗ėąą¦ųĄęčØMūŃŽĄĮyŠ½Č╚ę¬Ū¾Ż¼▒ŠŽĄĮyįOėŗ▓╔ė├16┬Ę8╬╗ADCųąĄ─7┬Ę═©Ą└ĪŻ
2.6“īäė┐žųŲ─ŻēK
ĪĪĪĪ ļŖÖCåóäė▓╔ė├PC33886ū„×ķ“īäėŲ„Ż¼“īäėļŖ┬ĘįŁ└Ē╚ńłD3ū¾▀ģ▓┐Ęų╦∙╩ŠĪŻMCU«a╔·Ą─PWM3═©▀^IN1ę²─_▌ö╚ļŻ¼ęįš{╣ØPC33886Ą─ OUT1Č╦┐┌Ą─▌ö│÷ļŖē║Ż¼▓óŪęIN2ĮėĄž╩╣OUT2▌ö│÷×ķ0Ż¼╩╣Ą├OUT1║═OUT2ų«ķg«a╔·ę╗éĆē║▓ŅŻ¼MCU═©▀^Ė─ūāPWM3Ą─š╝┐š▒╚üĒš{╣ØļŖÖC▐D╦┘ĪŻ
3ŽĄĮy▄ø╝■įOėŗ
3.1┐žųŲ╦ŃĘ©
ĪĪĪĪ į┌▀B└m┐žųŲŽĄĮyųąŻ¼░┤Ų½▓ŅĄ─▒╚└²(P)ĪóĘeĘų(I)Īó╬óĘų(D)▀Mąą┐žųŲĄ─PID┐žųŲ╦ŃĘ©½@Ą├┴╦ÅVĘ║Ą─æ¬ė├ĪŻ▀@ĘNöĄūųPID┐žųŲ╦ŃĘ©ĮYśŗ║åå╬Ż¼ģóöĄęūė┌š{š¹Ż¼▀mæ¬ąįÅŖĪŻ▒ŠŽĄĮyįOėŗ▓╔ė├į÷┴┐╩ĮöĄūųPID┐žųŲ╦ŃĘ©Ż¼═©▀^PWMš{╦┘ų▒┴„ļŖÖCĪŻ
3.2│╠ą“┴„│╠
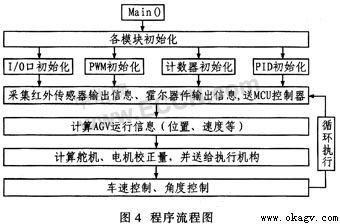
ĪĪĪĪ įōŽĄĮyĄ─ų„│╠ą“┴„│╠łD╚ńłD4╦∙╩ŠĪŻŽĄĮy╩ūŽ╚│§╩╝╗»įOéõŻ¼╚╗║¾▀M╚╦ģóöĄą▐Ė─│╠ą“Ż¼ģóöĄįOČ©═Ļ«ģ║¾┤“ķ_ųąöÓŻ¼ūŅ║¾čŁŁhł╠ąą╬╗ų├╦┘Č╚┐žųŲ│╠ą“ĪŻ
4 ĮY╩°šZ
ĪĪĪĪ īŹ“×╩Ūį┌5 000 minĪ┴6 000 mmĄ─ģ^ė“ā╚┤ŅĮ©Uą═ąą±éĄ└┬Ęųą▀MąąŻ¼┬ĘųąčļäØėą20 mmīÆĄ─║┌╔½ę²ī¦ŠĆĪŻš²│ŻŪķørŽ┬Ż¼ĮoČ©AGV─Żą═▄ćĄ─╦┘Č╚╔ŽŽ▐×ķ1 mŻ»sŻ¼AGVŲĮĘĆąą±éį┌ę²ī¦ŠĆ╔ŽŻ¼Å─│÷░l³cķ_╩╝Ż¼ĄĮūRäe│÷ĮK³c▓ó═Ż▄ćŻ¼╚½│╠╣▓║─Ģr22 sŻ╗ĮoČ©AGV─Żą═▄ć╦┘Č╚╔ŽŽ▐×ķ1.5 mŻ»sĢrŻ¼AGV▒╚▌^ŲĮĘĆĄžąą±éį┌ę²ī¦ŠĆ╔ŽŻ¼╚½│╠╣▓║─Ģr16 sŻ╗ĮoČ©AGV─Żą═▄ć╦┘Č╚╔ŽŽ▐×ķ2 mŻ»sĢrŻ¼AGVąą±é▓╗ĘĆČ©Ż¼į┌╣šÅØ╠ÄėąĢrĢ■ø_│÷ę²ī¦ŠĆŻ¼╚½│╠╣▓║─Ģr12 sĪŻĖ∙ō■ęį╔ŽīŹ“ׯ¼AGVĘĆČ©╣żū„Ą─ŲĮŠ∙╦┘Č╚×ķ1 mŻ»sĪŻAGV▓╗╩ŪĖé╦┘▄ć▌vŻ¼╣żśI¼Fł÷ę╗░ŃęįĘĆČ©Īó░▓╚½×ķų„ę¬┐╝æ]ę“╦žŻ¼╦∙ęį▒ŠįOėŗĄ──Żą═▄ćį┌ĘĆČ©ĘĮ├µ═Ļ╚½Ę¹║ŽAGV▄ćĄ─ęÄĘČŻ¼▀_ĄĮ┴╦ūįų„ę²ī¦Īó▀\▌öą¦┬╩Ė▀Īó╣Ø─▄Īó╣żū„┐╔┐┐Īó¤o╣½║”Ą╚ę¬Ū¾ĪŻ
╔Žę╗ŚlŻ║ūį╚╗ī¦ę²AGVį┌╝ęļŖąąśIĄ─æ¬ė├ Ž┬ę╗ŚlŻ║ AGVį┌┐éčb▄ćķgĄ─æ¬ė├
ļŖįÆŻ║0755-29851810
é„šµŻ║0755-27307147
Q QŻ║2448209188
Ó]ŽõŻ║zfj@okagv.com
ĄžųĘŻ║╔Ņ█┌╩ąīÜ░▓ģ^ĖŻ║ŻĮųĄ└┤¾č¾┬Ęųą╝ZĖŻ░▓ÖCŲ„╚╦┐Ų╝╝ł@14ŚØ

Copyright © 2012-2023 ╔Ņ█┌╩ąÜWµzųŪ─▄ÖCŲ„╚╦╣╔Ę▌ėąŽ▐╣½╦Š ░µÖÓ╦∙ėąĪĪ ╗øICPéõ 19115608 ╠¢ĪĪxml sitemap
┬ōŽĄļŖįÆ
400-007-3860QQū╔įā
2448209188╬óą┼
╬óą┼ū╔įā