īŻśI╠ß╣®é}ā”╬’┴„╔²╝ēĖ─įņĪó¤o╚╦░ß▀\ÖCŲ„╚╦«aŲĘ
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860





1Ż« öĄīWęÄäØĘĮĘ©
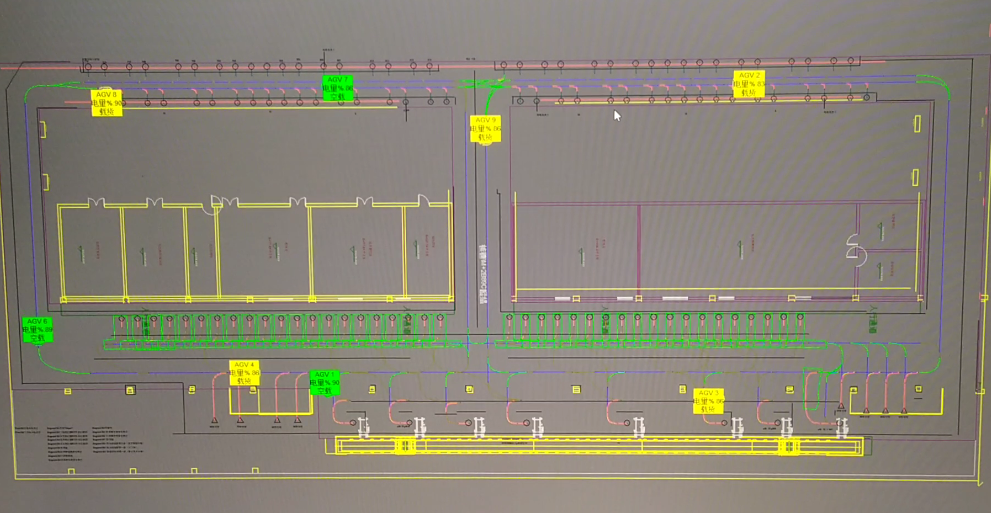
×ķAGV▀xō±ūŅ╝čĄ─╚╬äš╝░ūŅ╝č┬ĘÅĮŻ¼┐╔ęįÜw╝{×ķę╗éĆ╚╬äšš{Č╚å¢Ņ}ĪŻöĄīWęÄäØĘĮĘ©╩ŪŪ¾ĮŌš{Č╚å¢Ņ}ūŅā×ĮŌĄ─é„ĮyĘĮĘ©Ż¼įōĘĮĘ©Ą─Ū¾ĮŌ▀^│╠īŹļH╔Ž╩Ūę╗éĆ┘Yį┤Ž▐ųŲŽ┬Ą─īżā×▀^│╠ĪŻīŹė├ųąĄ─ĘĮĘ©ų„ę¬ėąš¹öĄęÄäØĪóäėæBęÄäØĪópetriĘĮĘ©Ą╚ĪŻį┌ąĪęÄ─Żš{Č╚ŪķørŽ┬Ż¼▀@ŅÉĘĮĘ©┐╔ęįĄ├ĄĮ▌^║├Ą─ĮY╣¹Ż¼Ą½╩ŪļSų°š{Č╚ęÄ─ŻĄ─į÷╝ėŻ¼Ū¾ĮŌå¢Ņ}║─┘MĄ─Ģrķg│╩ųĖöĄį÷ķLŻ¼Ž▐ųŲ┴╦įōĘĮĘ©į┌žōž¤Īó┤¾ęÄ─ŻīŹĢr┬ĘŠĆā×╗»║═š{Č╚ųąæ¬ė├ĪŻ
2Ż« Ę┬šµĘĮĘ©
Ę┬šµĘĮĘ©═©▀^ī”īŹļHĄ─š{Č╚ŁhŠ│Į©─ŻŻ¼Å─Č°ī”AGVĄ─ę╗ĘNš{Č╚ĘĮ░ĖĄ─īŹ╩®▀Mąąėŗ╦ŃÖCĄ──ŻöMĘ┬šµĪŻė├æ¶║═蹊┐╚╦åT┐╔ęį╩╣ė├Ę┬šµ╩ųČ╬ī”─│ą®š{Č╚ĘĮ░Ė▀Mąą£yįćĪó▒╚▌^Īó▒O┐žŻ¼Å─Č°Ė─ūā║═╠¶▀xš{Č╚▓▀┬įĪŻīŹė├ųą▓╔ė├Ą─ĘĮĘ©ėąļx╔ó╩┬╝■Ę┬šµĘĮĘ©Īó├µŽ“ī”Ž¾Ą─Ę┬šµĘĮĘ©║═3ŠSĘ┬šµ╝╝ągŻ¼ėąįSČÓ▄ø╝■┐╔ęįė├ė┌AGVĄ─š{Č╚Ę┬šµŻ¼ŲõųąŻ¼Lanner╝»łFĄ─Witness▄ø╝■┐╔ęį┐ņ╦┘Į©┴óĘ┬šµ─Żą═Ż¼īŹ¼FĘ┬šµ▀^│╠╚²ŠSč▌╩Š║═ĮY╣¹Ą─Ęų╬÷╠Ä└ĒĪŻ
3Ż« ╚╦╣żųŪ─▄ĘĮĘ©
╚╦╣żųŪ─▄ĘĮĘ©░čAGVĄ─š{Č╚▀^│╠├Ķ╩÷│╔ę╗éĆį┌ØMūŃ╝s╩°Ą─ĮŌ╝»╦č╦„ūŅā×ĮŌĄ─▀^│╠ĪŻ╦³└¹ė├ų¬ūR▒Ē╩Š╝╝ągīó╚╦Ą─ų¬ūR░³└©▀M╚źŻ¼═¼Ģr╩╣ė├Ė„ĘN╦č╦„╝╝ąg┴”Ū¾Įo│÷ę╗éĆ┴Ņ╚╦ØMęŌĄ─ĮŌĪŻŠ▀¾wĄ─ĘĮĘ©ėąīŻ╝ꎥĮyĘĮĘ©Īó▀zé„╦ŃĘ©Īóåó░l╩Į╦ŃĘ©Īó╔±ĮøŠWĮj╦ŃĘ©ĪŻŲõųąŻ¼īŻ╝ꎥĮyĘĮĘ©į┌īŹė├ųą▌^ČÓ▓╔ė├Ż¼╦³īóš{Č╚īŻ╝ęĄ─Įø“×│ķŽ¾│╔ŽĄĮy┐╔ęį└ĒĮŌ║═ł╠ąąĄ─š{Č╚ęÄätŻ¼▓óŪę▓╔ė├ø_═╗Ž¹ĮŌ╝╝ągüĒĮŌøQ┤¾ęÄ─ŻAGVš{Č╚ųąĄ─ęÄät┼“├ø║═ø_═╗å¢Ņ}ĪŻ
4.ė╔ė┌╔±ĮøŠWĮjŠ▀ėą▓óąą▀\╦ŃĪóų¬ūRĘų▓╝┤µā”Īóūį▀mæ¬ąįÅŖĄ╚ā׳cŻ¼ę“┤╦Ż¼╦³│╔×ķŪ¾ĮŌ┤¾ęÄ─ŻAGVš{Č╚å¢Ņ}╩Ūę╗éĆ║▄ėąŽŻ═¹Ą─ĘĮĘ©ĪŻ─┐Ū░Ż¼ė├╔±ĮøŠWĮjĘĮĘ©│╔╣”Ą─Ū¾ĮŌ┴╦TSP-NPå¢Ņ}Ż¼Ū¾ĮŌųąŻ¼╔±ĮøŠWĮj─▄░čĮM║Žā×╗»å¢Ņ}Ą─ĮŌ▐DōQ│╔ę╗ĘNļx╔óäė┴”īWŽĄĮyĄ──▄┴┐║»öĄŻ¼═©▀^╩╣─▄┴┐║»öĄ▀_ĄĮūŅąĪČ°Ū¾Ą├ā×╗»å¢Ņ}Ą─ĮŌĪŻ
5.▀zé„╦ŃĘ©╩Ū─ŻöMūį╚╗Įń╔·╬’▀M╗»▀^│╠ųąĄ─▀zé„║═ūā«ÉČ°ą╬│╔Ą─ę╗ĘNā×╗»Ū¾ĮŌĘĮĘ©ĪŻ▀zé„╦ŃĘ©į┌Ū¾ĮŌAGVĄ─ā×╗»š{Č╚å¢Ņ}ĢrŻ¼╩ūŽ╚═©▀^ŠÄ┤aīóę╗Č©öĄ┴┐Ą─┐╔─▄š{Č╚ĘĮ░Ė▒Ē╩Š│╔▀m«öĄ─╚Š╔½¾wŻ¼▓óėŗ╦Ń├┐éĆ╚Š╔½¾wĄ─▀mæ¬Č╚Ż©╚ń▀\ąą┬ĘÅĮūŅČ╠Ż®Ż¼═©▀^ųžÅ═▀MąąÅ═ųŲĪóĮ╗▓µĪóūā«Éīżšę▀mæ¬Č╚┤¾Ą─╚Š╔½¾wŻ¼╝┤AGVš{Č╚å¢Ņ}Ą─ūŅā×ĮŌĪŻ▒Š╬─üĒį┤ė┌AGV░╔
╔Žę╗ŚlŻ║╗∙ė┌ūį┐╣ö_┐žųŲĄ─3CęĢėXī¦║Įųž▌dAGVŽĄĮyįOėŗ Ž┬ę╗ŚlŻ║ūįäėī¦ę²▄ćAGVĄ─ā×╚▒³c
ļŖįÆŻ║0755-29851810
é„šµŻ║0755-27307147
Q QŻ║2448209188
Ó]ŽõŻ║zfj@okagv.com
ĄžųĘŻ║╔Ņ█┌╩ąīÜ░▓ģ^ĖŻ║ŻĮųĄ└┤¾č¾┬Ęųą╝ZĖŻ░▓ÖCŲ„╚╦┐Ų╝╝ł@14ŚØ

Copyright © 2012-2023 ╔Ņ█┌╩ąÜWµzųŪ─▄ÖCŲ„╚╦╣╔Ę▌ėąŽ▐╣½╦Š ░µÖÓ╦∙ėąĪĪ ╗øICPéõ 19115608 ╠¢ĪĪxml sitemap
┬ōŽĄļŖįÆ
400-007-3860QQū╔įā
2448209188╬óą┼
╬óą┼ū╔įā