īŻśI╠ß╣®é}ā”╬’┴„╔²╝ēĖ─įņĪó¤o╚╦░ß▀\ÖCŲ„╚╦«aŲĘ
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860





│ŻęŖĄ─AGVī¦║ĮĘĮ╩Įų„ę¬ėąęįŽ┬ÄūĘNŻ¼Ęųäeėąų°▓╗═¼Ą─▀mė├ł÷Š░║═╠ž³cŻ║
┤┼Ślī¦║Į
į┌┬Ę├µ╔ŽõüįO┤┼ŚlŻ¼═©▀^┤┼ī¦║Įé„ĖąŲ„▓╗ķgöÓĖąæ¬┤┼ą┼╠¢üĒīŹ¼FAGVĄ─ī¦║ĮĪŻ
ā׳c×ķ╝╝ąg│╔╩ņ┐╔┐┐Ż¼│╔▒Š▌^Ą═Ż¼õüįOīŹ╩®▌^×ķ║åå╬ĪŻ╚▒³c╩Ūę¬╠ßŪ░╩®╣żŻ╗┤┼Śl╚▌ęū╩▄ōp║═╬█╚ŠŻ¼ąĶČ©Ų┌ŠSūoŻ╗ŪęAGVąą±é┬ʊƤoĘ©▒ŃĮ▌š{š¹Ż¼ņ`╗Ņąį▓ŅĪŻ

┤┼ßöī¦║Į
═¼śė╩Ū═©▀^┤┼ī¦║Įé„ĖąŲ„Ėąæ¬┤┼ą┼╠¢üĒ▀Mąąī¦║ĮŻ¼▓╗═¼Ą─╩Ūīóų«Ū░Ą─┤┼Śl▀B└mĖąæ¬╠µ┤·×ķ┤┼ßöķgĖ¶Ėąæ¬Ż¼AGVąą▀M┬ĘÅĮė╔┤┼ßö▀BŠĆ┤_Č©ĪŻ
ā׳c×ķ╝╝ąg│╔╩ņ┐╔┐┐Ż¼│╔▒Š▌^Ą═Ż╗ļ[▒╬ąį▌^║├Ż¼▓╗ęū▒╗ōpē─ĪŻ╚▒³c╩ŪąĶ╠ßŪ░ķ_ĶÅŅA┬±Ż¼╩®╣ż│╔▒ŠĖ▀Ż╗ņ`╗Ņąį▓ŅŻ¼║¾Ų┌ūāĖ³│╔▒ŠĖ▀Ż╗┤┼ßöķgĖ¶ģ^ė“┤µį┌▓╗ĘĆČ©ąįŻ¼▓╗▀mæ¬╚╦ÖC╣▓╚┌ŁhŠ│Ż╗Ūęį┌ųž▌dł÷Š░Ž┬Ż¼┤┼ßö╚▌ęū▒╗ōpē─Ż¼Ė³ōQ└¦ļyĪŻ

Č■ŠS┤aī¦║Į
ė╔Č■ŠS┤a╠µ┤·┤┼ßöĄ─ī¦║ĮĘĮ╩ĮŻ¼Ąõą═æ¬ė├×ķüå±R▀dkivaÖCŲ„╚╦Ż¼īŹ¼F┴╦Ī░žøĄĮ╚╦Ī▒Ą─Æ■▀x─Ż╩ĮĪŻ
ā׳c×ķAGV▀\ąą£╩┤_Ż¼õüįO│╔▒ŠĄ═Ż¼┬ĘÅĮš{š¹▌^×ķĘĮ▒ŃŻ╗▓╗ūŃų«╠Äį┌ė┌Č■ŠS┤a╚▌ęū╬█ōpŻ¼ąĶČ©Ų┌ŠSūoŻ╗æ¬ė├╚ßąįĄ═Ż¼¤oĘ©▀mæ¬╚╦ÖC╣▓╚┌ŁhŠ│Ż╗═¼Ģrī”ū„śIŁhŠ│Ż©╚ń¤oēm╩꯮║═Ąž├µŲĮš¹Č╚Ą╚┐═ė^Śl╝■ėąę╗Č©ę¬Ū¾ĪŻ
╝ż╣ŌĘ┤╔õ░Õī¦║Į
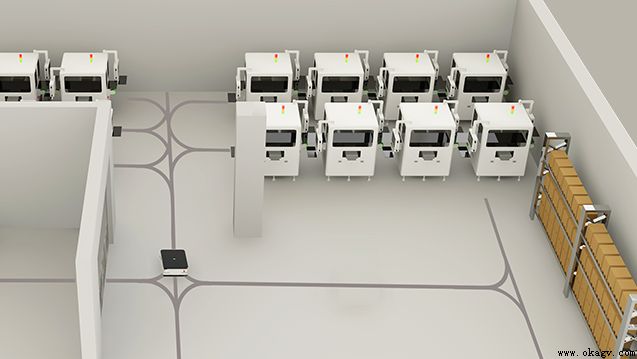
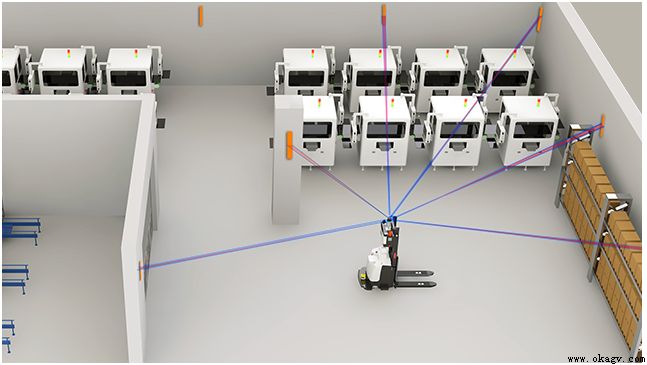
į┌AGVąą±é┬ĘÅĮĄ─ų▄ć·░▓čb╬╗ų├Š½┤_Ą─╝ż╣ŌĘ┤╔õ░ÕŻ¼AGV═©▀^╝ż╣ŌÆ▀├ĶŲ„░l╔õ╝ż╣Ō╩°Ż¼═¼Ģr▓╔╝»ė╔Ę┤╔õ░ÕĘ┤╔õĄ─╝ż╣Ō╩°Ż¼üĒ┤_Č©Ųõ«öŪ░Ą─╬╗ų├║═║ĮŽ“Ż¼▓ó═©▀^▀B└mĄ─╚²ĮŪÄū║╬▀\╦ŃüĒīŹ¼FAGVĄ─ī¦ę²ĪŻ
ā׳c×ķĄž├µ¤oąĶ╩®╣żŻ¼AGVąą±é┬ĘŠĆņ`╗ŅĪŻ▓╗ūŃų«╠Äį┌ė┌ąĶę¬╠ßŪ░░┤ššę╗Č©ę¬Ū¾õüįOĘ┤╔õ░ÕŻ¼│╔▒Š▌^Ė▀Ż╗▀mė├ė┌ų▄▀ģ¤oš┌ō§Ą─ū„śIŁhŠ│ĪŻ
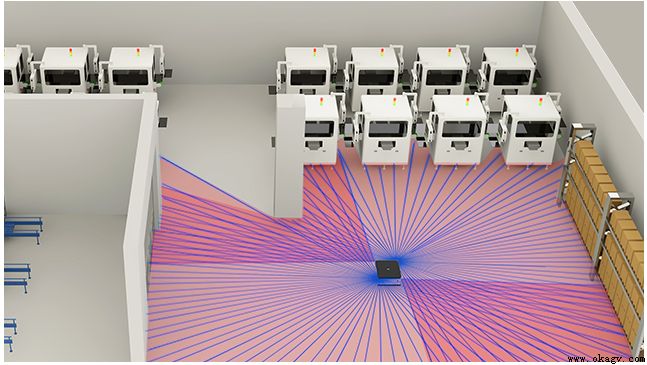
╝ż╣ŌSLAMī¦║Į
¤oąĶČ■ŠS┤aĪóĘ┤╔õ░ÕĄ╚▌oų·ī¦║Įś╦ųŠŻ¼Č°╩Ū═©▀^╣żū„ł÷Š░Ą─ūį╚╗ŁhŠ│Ż©▒╚╚ńų∙ūėĪóē”├µĄ╚Ż®ū„×ķģóšš╬’Ż¼īŹ¼FČ©╬╗ī¦║ĮĪŻ
ā׳cį┌ė┌¤oąĶė▓╝■╩®╣żŻ¼▓┐╩│╔▒ŠĄ═Ż╗Ūę─▄ē“īŹ¼Fņ`╗ŅĄ─═ŻšŽ▒▄šŽ║═╚╦ÖC╣▓╚┌ū„śIŻ╗AGVąą±é┬ĘÅĮņ`╗ŅČÓūāŻ¼▓ó┐╔═©▀^▄ø╝■▀MąąäėæBŠÄ▌ŗŻ¼ØMūŃ╚ßąį╔·«aąĶ꬯╗Ą½į┌æ¬ė├ųąę▓┤µį┌ę╗ą®▒ūČ╦Ż¼▒╚╚ńį┌Ė▀äėæB╗“ŅÉ╦Ų═Ė├„ĪóńR├µĄ╚ŁhŠ│ųąū„śIĢrŻ¼╚▌ęū│÷¼FČ©╬╗üG╩¦Ą─ŪķørĪŻüĒį┤Ż║ÖCŲ„╚╦į┌ŠĆ
╔Žę╗ŚlŻ║AGV║═ųŪ─▄ļŖ╠▌Į╗╗źŽĄĮyĄ─蹊┐┼cæ¬ė├ Ž┬ę╗ŚlŻ║▀x┘ÅagvąĪ▄ćļŖ│žąĶę¬ūóęŌĄ─Äū³c
ļŖįÆŻ║0755-29851810
é„šµŻ║0755-27307147
Q QŻ║2448209188
Ó]ŽõŻ║zfj@okagv.com
ĄžųĘŻ║╔Ņ█┌╩ąīÜ░▓ģ^ĖŻ║ŻĮųĄ└┤¾č¾┬Ęųą╝ZĖŻ░▓ÖCŲ„╚╦┐Ų╝╝ł@14ŚØ

Copyright © 2012-2023 ╔Ņ█┌╩ąÜWµzųŪ─▄ÖCŲ„╚╦╣╔Ę▌ėąŽ▐╣½╦Š ░µÖÓ╦∙ėąĪĪ ╗øICPéõ 19115608 ╠¢ĪĪxml sitemap
┬ōŽĄļŖįÆ
400-007-3860QQū╔įā
2448209188╬óą┼
╬óą┼ū╔įā