īŻśI╠ß╣®é}ā”╬’┴„╔²╝ēĖ─įņĪó¤o╚╦░ß▀\ÖCŲ„╚╦«aŲĘ
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860





ČÓ┤·└Ē┬ĘÅĮīżšę(Multi-agent path finding/MAPF)ęčį┌╚╦╣żųŪ─▄ĪóÖCŲ„╚╦Īó└Ēšōėŗ╦ŃÖC┐ŲīW║═īŹļH▓┘ū„蹊┐ųąĄ├ĄĮ┤¾┴┐Ą─蹊┐ĪŻ▒Š╬─ėæšō┴╦į┌īóMAPFĘĮĘ©═ŲÅVĄĮīŹļHł÷Š░Ģr│÷¼FĄ─å¢Ņ}┼cĮŌøQ▀@ą®å¢Ņ}Ą─╦─éĆ蹊┐ĘĮŽ“ĪŻ╬ęéāÅŖš{Ą─╩ŪĮŌøQ▀@ą®å¢Ņ}Ą─ųžę¬ąįŻ¼Č°▓╗╩Ū×ķMAPFå¢Ņ}Ą─ś╦£╩─Żą═ķ_░lĖ³┐ņĄ─ĘĮĘ©ĪŻ
1 ę²čį
ČÓ┤·└Ē┬ĘÅĮīżšę(MAPFŻ¼ę▓ĮąČÓ┤·└ĒīżÅĮ)į┌╚╦╣żųŪ─▄ĪóÖCŲ„╚╦Īó└Ēšōėŗ╦ŃÖC┐ŲīW║═īŹļH▓┘ū„蹊┐ųąĄ├ĄĮ┤¾┴┐Ą─蹊┐ĪŻ(ś╦£╩)MAPFĄ─╚╬äš╩Ū×ķČÓéĆ┤·└Ē(agent)šęĄĮį┌ĮoČ©łD(graph)ųąÅ─Ųõ«öŪ░Ēö³c(vertices)ĄĮŲõ─┐ś╦Č°▓╗┼cŲõ╦³┤·└Ē░l╔·┼÷ū▓Ą─┬ĘÅĮŻ¼═¼Ģrā×╗»│╔▒Š║»öĄ(cost function)ĪŻ¼FėąĄ─ MAPF ╩╣ė├Ą─ĘĮĘ©░³└©Ż║Å─┐╔ØMūŃąį£p╔┘å¢Ņ}(reductions to problems from satisfiability)Īóš¹öĄŠĆąįęÄäØ(integer linear programming)Īó╗ž┤╝»ŠÄ│╠(answer set programming)[Yu and LaValleŻ¼ 2013b; Erdem et al.Ż¼ 2013; SurynekŻ¼ 2015]ĪóūŅā×/ėąŽ▐┤╬ā×(optimalŻ¼bounded-suboptimal)╗“┤╬ā×╦č╦„ĘĮĘ©(suboptimal search method)[SilverŻ¼ 2005; Sturtevant and BuroŻ¼ 2006; RyanŻ¼ 2008; Wang and BoteaŻ¼ 2008; StandleyŻ¼ 2010; Standley and KorfŻ¼ 2011; Wang and BoteaŻ¼ 2011; Luna and BekrisŻ¼ 2011; Sharon et al.Ż¼ 2013; de Wilde et al.Ż¼ 2013; Barer et al.Ż¼ 2014; Goldenberg et al.Ż¼ 2014; Wagner and ChosetŻ¼ 2015; Boyarski et al.Ż¼ 2015; Sharon et al.Ż¼ 2015]ĪŻ
╬ęéāūŅĮ³čąŠ┐┴╦īó MAPF ═ŲÅVĄĮīŹļHł÷Š░Ģr│÷¼FĄ─Ė„ĘNå¢Ņ}Ż¼░³└© Kiva(Amazon Robotics)é}ÄņŽĄĮy[Wurman et al.Ż¼ 2008](łD1)║═ūįäė’wąąŲ„Ā┐ę²▄ć[Morris et al.Ż¼ 2016]ĪŻ▀@ą®å¢Ņ}┐╔ęįĘų×ķā╔éĆę╗░Ńå¢Ņ}Ż║
1Īó×ķ MAPF å¢Ņ}Ą─ś╦£╩─Żą═ķ_░lĖ³┐ņĄ─ĘĮĘ©╩Ū▓╗ē“Ą─Ż¼ę“×ķį┌įSČÓīŹļHŪķørŽ┬Ż¼┐╔ęį└¹ė├ą┬Ą─ĮYśŗ╗“ąĶꬹ┬Ą─å¢Ņ}─Żą═ĪŻ
2ĪóāHīó MAPF ╗“Ųõą┬Ą──Żą═ū„×ķĮM║Žā×╗»å¢Ņ}▀MąąčąŠ┐╩Ū▓╗ē“Ą─Ż¼ę“×ķ╦∙«a╔·Ą─ MAPF ĮŌøQĘĮ░Ėę▓ąĶꬳ╠ąąĪŻ
╬ęéāÅ─▓╗═¼Ą─ĮŪČ╚ėæšō┴╦ĮŌøQ▀@ā╔éĆå¢Ņ}Ą─╦─éĆ蹊┐ĘĮŽ“Ż║
1.į┌įSČÓīŹļHĄ─ČÓ┤·└ĒŽĄĮyųąŻ¼į┌×ķ╦∙ėą┤·└ĒšęĄĮūŅ╝č┬ĘÅĮų«Ū░Ż¼┤·└ĒŽ╚▒╗äØĘų│╔ĮM(team)Ż¼╚╗║¾Įo├┐éĆĮMĘų┼õ╠žČ©Ą──┐ś╦Ż¼├┐éĆ┤·└ĒąĶę¬Å─╦∙į┌Ą─ĮMųą▒╗ųĖČ©ę╗éĆ─┐ś╦ĪŻ╬ęéāęčĮø×ķ▓╗═¼ĮMĄ─┤·└ĒųŲČ©┴╦ĮM║Ž─┐ś╦Ęų┼õ║═┬ĘÅĮ▓ķšę(TAPF/target assignment and path finding)å¢Ņ}üĒĮŌøQ▀@éĆ└¦ļyĪŻ╬ęéā▀Ćķ_░l┴╦ę╗éĆūŅ╝č TAPF ĘĮĘ©Ż¼╦³┐╔ęįöUš╣ĄĮÄū╩«éĆĮM║═öĄ░┘éĆ┤·└Ē[Ma and KoenigŻ¼ 2016]ĪŻ

2.į┌įSČÓīŹļHĄ─ČÓ┤·└ĒŽĄĮyųąŻ¼┤·└Ē╩Ū─õ├¹Ą─(┐╔Į╗ōQĄ─)Ż¼Ą½╩Ū╦³éāĄ─ėąą¦▌d║╔╩ŪĘŪ─õ├¹Ą─(▓╗┐╔Į╗ōQĄ─)Ż¼▓óŪęąĶę¬▒╗é„▀fĮoĮoČ©Ą──┐ś╦ĪŻ┤·└Ē═©│Ż┐╔ęįį┌▀@śėĄ─ŽĄĮyųąĮ╗ōQŲõėąą¦▌d║╔ĪŻū„×ķĄ┌ę╗┤╬ćLįćŻ¼╬ęéāįOėŗ┴╦░³╣³Į╗ōQÖCŲ„╚╦┬Ęė╔(package-exchange robot routing/PERR)å¢Ņ}Ż¼ęįĮŌøQĖ³ČÓę╗░Ń╗»Ą─(į╩įSėąą¦▌d║╔▐DęŲĄ─)▀\▌öå¢Ņ}[Ma et al.Ż¼ 2016]ĪŻį┌▀@Ų¬╬─š┬ųąŻ¼╬ęéā▀ĆūC├„┴╦Į³╦ŲūŅā× MAPF ĮŌĄ─└¦ļyąį(Å═ļsČ╚)ĪŻ
3.į┌įSČÓīŹļHĄ─ČÓ┤·└ĒŽĄĮyųąŻ¼┤·└Ē▀\äė(agent motions)Ą─ę╗ų┬ąį║═┤·└Ē▀\äėĄ─ĮY╣¹┐╔ŅA£yąį╩Ūųžę¬Ą─(╠žäe╩Ūį┌ė╔╚╦║═┤·└Ē╣▓ŽĒĄ─╣żū„┐šķgųą)Ż¼Ą½╩Ū¼FėąĄ─ MAPF ĘĮĘ©ø]ėą┐╝æ]▀@ę╗³cĪŻ╬ęéāęčĮøĘųā╔éĆļAČ╬╠Į╦„┴╦ĮoČ© MAPF └²ūėĄ─å¢Ņ}ĮYśŗŻ║į┌Ą┌ę╗ļAČ╬Ż¼╬ęéāķ_░l┴╦ę╗ĘN×ķ┤·└Ēīżšę┬ĘÅĮĄ─ĘĮ░ĖŻ¼Ųõųą░³║¼┴╦ė╔ė├æ¶╠ß╣®Ą─įSČÓĦ▀ģŠēĄ─Ė▀╦┘╣½┬Ę(highways)Ż¼▀@éĆĘĮ░Ė▀_ĄĮ┴╦┤·└Ē▀\äėĄ─ę╗ų┬ąį║═┐╔ŅA£yąį[Cohen et al.Ż¼ 2015];į┌Ą┌Č■ļAČ╬Ż¼╬ęéāķ_░l┴╦ūįäė╔·│╔Ė▀╦┘╣½┬ĘĄ─ĘĮĘ©[Cohen et al.Ż¼ 2016]ĪŻ
4.MAPF Ą─ņ`Ėąų„ę¬üĒį┤ė┌ČÓÖCŲ„╚╦ŽĄĮyĄ─ī¦║Į╗“▀\äėęÄäØ─ŻēKĪŻ╚╗Č°Ż¼MAPF ĮŌøQĘĮ░ĖĄ─ūŅā׹į╗“ėąŽ▐┤╬ā׹į▓╗ę╗Č©ęŌ╬Čų°╦³éāĄ─¶ö░¶ąįŻ¼╠žäe╩Ū┐╝æ]ĄĮ¼FīŹųąÖCŲ„╚╦▓╗═Ļ├└Ą─ęÄäØł╠ąą(plan-execution)─▄┴”ĪŻ╬ęéāķ_░l┴╦ę╗éĆ┐“╝▄Ż¼╦³─▄ėąą¦Ąž║¾Ų┌╠Ä└Ē(postprocesses)MAPF ĘĮĘ©Ą─▌ö│÷Ż¼ė├ė┌äōĮ©ę╗éĆ┐╔ęįė╔īŹļHĄ─ČÓÖCŲ„╚╦ŽĄĮył╠ąąĄ─ęÄäØł╠ąą░▓┼┼ĪŻ
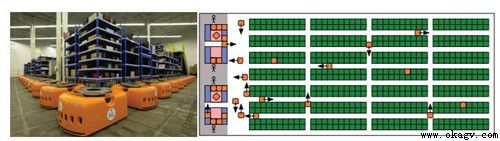
łD 1 Ż║(ū¾łD)ūįäė±{±éå╬į¬║═┐╔ęį▒╗±{±éå╬į¬ęŲäėĄ─┤µā”«aŲĘĄ─┤µā”┼ō(storage pod);(ėęłD)Ąõą═ Kiva é}ÄņŽĄĮyĄ─▓╝Šų(Wurman et al.Ż¼ 2008)
×ķ┴╦īó MAPF ĘĮĘ©═ŲÅVĄĮīŹļHĄ─ł÷Š░Ż¼╬ęéā¼Fį┌š╣╩Š▀@ą®čąŠ┐ĘĮŽ“Ą─īŹė├ąįŻ¼ęįūC├„ĮŌøQ▀@ā╔éĆå¢Ņ}┼cķ_░lĖ³┐ņĄ─ MAPF å¢Ņ}Ą─ś╦£╩─Żą═ĘĮĘ©ę╗śėųžę¬(╔§ų┴Ė³ųžę¬)ĪŻ
2 ┤·└ĒĮMĄ──┐ś╦Ęų┼õ║═┬ĘÅĮ▓ķšę(TAPF)Ą─ĮM║Ž
ę╗░ŃüĒšfŻ¼╩Ū░┤šš┤·└Ē╦∙į┌Ą─├┐éĆĮMĘų┼õ─┐ś╦ĪŻ┤·└ĒŽ╚▒╗äØĘųĄĮĮMųąŻ¼╚╗║¾├┐éĆ┤·└ĒąĶę¬Å─╦∙į┌Ą─ĮMųą▒╗ųĖČ©ę╗éĆ─┐ś╦Ż¼ęį▒ŃĄ├ĄĮ┤·└ĒÅ─«öŪ░Ēö³cĄĮŲõ─┐ś╦Ą─┬ĘÅĮüĒā×╗»│╔▒Š║»öĄĪŻ└²╚ńŻ¼į┌ Kiva é}ÄņŽĄĮyųąŻ¼īó┤µā”┼ōÅ─é}Äņ░ß▀\ĄĮą┬┤µā”╬╗ų├Ą─±{±éå╬į¬(drive unit)Ģ■ą╬│╔ę╗éĆĮMŻ¼ę“×ķ╦³éāųąĄ─├┐ę╗éĆąĶę¬▒╗Ęų┼õę╗éĆ┐╔ė├Ą─┤µā”╬╗ų├ĪŻęįŪ░Ą─ MAPF ĘĮĘ©╝┘įO┤µį┌─┐ś╦Ęų┼õ│╠ą“Ż¼╩╣Ą├├┐éĆ┤·└ĒŅAŽ╚▒╗Ęų┼õę╗éĆ─┐ś╦Ż¼Ą½╩Ū×ķ┴╦īŹ¼FūŅā׹įŻ¼╬ęéāĮ©┴ó┴╦ TAPF ─Żą═Ż¼╦³š¹║Ž┴╦─┐ś╦Ęų┼õ║═┬ĘÅĮīżšęå¢Ņ}▓óŪę×ķ╦³éāČ©┴x┴╦ę╗éĆ╣▓═¼Ą──┐ś╦ĪŻį┌ TAPF ųąŻ¼┤·└Ē▒╗ĘųĄĮĖ„ĮMųąŻ¼├┐éĆĮMĄ──┐ś╦öĄ┴┐┼cįōĮMųąĄ─┤·└ĒöĄ┴┐ŽÓ═¼ĪŻTAPF Ą─╚╬äš╩Ūīó─┐ś╦Ęų┼õĮo┤·└ĒŻ¼▓óęÄäØ┤·└ĒÅ─«öŪ░Ēö³cĄĮŲõ─┐ś╦Ą─▓╗Ģ■░l╔·┼÷ū▓Ą─┬ĘÅĮŻ¼╩╣Ą├├┐éĆ┤·└ĒŪĪ║├ęŲäėĄĮŲõ╦∙į┌ĮMĄ─ę╗éĆ─┐ś╦Ż¼Å─Č°ĮMųąĄ─╦∙ėą─┐ś╦▒╗įLå¢Ż¼ŪęūŅ┤¾═Ļ│╔Ģrķg(«ö╦∙ėą┤·└ĒęčĮøĄĮ▀_Ųõ─┐ś╦▓ó═Żų╣ęŲäėĢrĄ─ūŅįńĢrķg▓ĮķL)▒╗ūŅąĪ╗»ĪŻĮMųąĄ─├┐éĆ┤·└ĒČ╝┐╔ęį▒╗Ęų┼õĄĮ╦∙į┌ĮMĄ──┐ś╦Ż¼▓óŪę═¼ę╗ĮMųąĄ─┤·└Ēę“┤╦╩Ū┐╔Į╗ōQĄ─ĪŻ╚╗Č°Ż¼▓╗═¼ĮMųąĄ─┤·└Ē▓╗┐╔Į╗ōQĪŻTAPF ┐╔ęį▒╗ęĢ×ķ(ś╦£╩)MAPF ║═ MAPF Ą──õ├¹ūā¾wĄ─ę╗░Ń╗»Ż║
üĒūį TAPFĄ─(ś╦£╩)MAPF ĮY╣¹Ż¼╚ń╣¹├┐éĆĮMāHė╔ę╗éĆ┤·└ĒĮM│╔Ż¼ätĮMĄ─öĄ┴┐Ą╚ė┌┤·└ĒĄ─öĄ┴┐ĪŻ─┐ś╦ĄĮ┤·└ĒĄ─Ęų┼õ╩ŪŅAŽ╚┤_Č©Ą─Ż¼ę“┤╦┤·└Ē╩ŪĘŪ─õ├¹Ą─(▓╗┐╔Į╗ōQĄ─)ĪŻ
╚ń╣¹ų╗ėąę╗éĆĮM(░³║¼╦∙ėą┤·└Ē)Ż¼ät MAPF Ą──õ├¹ūā┴┐(ę▓ĘQ×ķ─┐ś╦▓╗ūāĄ─ MAPF)üĒūį TAPFĪŻ┤·└Ē┐╔ęį▒╗Ęų┼õ╚╬║╬─┐ś╦Ż¼ę“┤╦╩Ū┐╔Į╗ōQĄ─ĪŻ╦³┐╔ęįį┌ČÓĒŚ╩ĮĢrķgā╚ė├╗∙ė┌┴„Ą─ MAPF ĘĮĘ©(flow-based MAPF method)Ą├ĄĮūŅā×ĮŌ[Yu and LaValleŻ¼ 2013a; Turpin et al.Ż¼ 2014].
«öŪ░ūŅŽ╚▀MĄ─ūŅā× TAPF ĘĮĘ©Ī¬Ī¬ĘQ×ķ╗∙ė┌┼÷ū▓Ą─ūŅąĪ│╔▒Š┴„(Conflict-Based Min-Cost Flow)[Ma and KoenigŻ¼ 2016]Ī¬Ī¬ĮY║Ž┴╦╦č╦„║═╗∙ė┌┴„Ą─ MAPF ĘĮĘ©ĪŻ╦³┐╔ęį═ŲÅVĄĮÄū╩«éĆĮM║═öĄ░┘éĆ┤·└ĒĪŻ
3 MAPF Ą─░³╣³Į╗ōQÖCŲ„╚╦┬Ęė╔(PERR)║═ą┬Ą─Å═ļsČ╚ėŗ╦ŃĮY╣¹
┤·└Ē═©│Ż╩Ū─õ├¹Ą─Ż¼Ą½öyĦ▒╗Ęų┼õ─┐ś╦Ą─ėąą¦▌d║╔(░³╣³)Ż¼ę“┤╦╩ŪĘŪ─õ├¹Ą─ĪŻ└²╚ńŻ¼į┌ Kiva é}ÄņŽĄĮyųąŻ¼±{±éå╬į¬╩Ū─õ├¹Ą─Ż¼Ą½╩Ū╦³éāöyĦĄ─┤µā”┼ō▒╗Ęų┼õ┴╦┤µā”╬╗ų├Ż¼ę“┤╦╩ŪĘŪ─õ├¹Ą─ĪŻ╚ń╣¹├┐éĆ┤·└ĒČ╝öyĦę╗éĆ░³╣³Ż¼ätįōå¢Ņ}ŽÓ«öė┌(ś╦£╩)MAPFĪŻīŹļH╔ŽŻ¼░³╣³═©│Ż┐╔ęįį┌┤·└Ēų«ķgé„▀fŻ¼▀@ī¦ų┬Ė³ę╗░ŃĄ─▀\▌öå¢Ņ}Ż¼└²╚ńŻ¼Ä¦ėąōQ│╦Ą─│╦┐═╣▓ŽĒ│╦▄ć[Coltin and VelosoŻ¼ 2014]║═į┌▐k╣½╩ęųą╩╣ė├ÖCŲ„╚╦Ą─░³╣³▀f╦═[Veloso et al.Ż¼ 2015]ĪŻ╬ęéāęčĮøīó PERR ū„×ķ└ĒĮŌ▀@ą®å¢Ņ}Ą─Ą┌ę╗▓Į[Ma et al.Ż¼ 2016]ĪŻį┌ PERR ųąŻ¼├┐éĆ┤·└Ē▀\▌dę╗éĆ░³╣³Ż¼ŽÓÓÅĒö³cųąĄ─╚╬║╬ā╔éĆ┤·└Ē┐╔ęįĮ╗ōQŲõ░³╣³Ż¼▓óŪę├┐éĆ░³ąĶ╣³ę¬▒╗▀f╦═ĄĮĮoČ©─┐ś╦ĪŻPERR ę“┤╦┐╔ęį▒╗ęĢ×ķ(ś╦£╩)MAPF Ą─Ė─▀M░µŻ║
PERR ųąĄ─░³╣³┐╔ęį▒╗ęĢ×ķį┌(ś╦£╩)MAPF ųąĄ─ūį╝║ęŲäėĄ─┤·└ĒĪŻ
į╩įSį┌ŽÓÓÅĒö³cųąĄ─ā╔éĆ░³╣³į┌ PERR ųąĮ╗ōQ╦³éāĄ─Ēö³cŻ¼Ą½╩Ūį┌ŽÓÓÅĒö³cųąĄ─ā╔éĆ┤·└Ē▓╗į╩įSį┌(ś╦£╩)MAPF ųąĮ╗ōQ╦³éāĄ─Ēö³cĪŻ
K-PERR ╩Ū PERR Ą─ę╗░Ń╗»Ż¼Ųõųą░³╣³▒╗Ęų│╔ K éĆŅÉą═Ż¼▓óŪęŽÓ═¼ŅÉą═Ą─░³╣³╩Ū┐╔Į╗ōQĄ─ĪŻę“×ķį┌ TAPF ųąŻ¼┤·└Ē▒╗ĘųĄĮĮMųąŻ¼▓óŪę═¼ę╗łFĻĀųąĄ─┤·└Ē╩Ū┐╔Į╗ōQĄ─Ż¼╦∙ęį K-PERR ┐╔ęį▒╗ęĢ×ķī” K éĆĮMĄ─ TAPF Ą─Ė─░µŻ¼═¼śėĄ─įŁ└ĒŻ¼PERR ┐╔ęį▒╗ęĢ×ķ(ś╦£╩)MAPF Ą─Ė─░µĪŻ╬ęéāęčĮøūC├„┴╦Į³╦ŲūŅ╝č PERR ║═ K-PERR ĮŌĄ─└¦ļyąį(ī”ė┌KĪ▌2)ĪŻ╬ęéāĄ─蹊┐Ą─ę╗éĆ═Ųšō╩ŪŻ║į┌╚╬║╬ę“ūėąĪė┌4/3ā╚Ą─ūŅ┤¾═Ļ╣żĢrķgūŅąĪ╗»Ż¼Į³╦Ų MAPF ║═ TAPF ╩Ū NP-hard Ą─Ż¼╝┤╩╣╩Ūų╗ėąā╔éĆłFĻĀĄ─ TAPFĪŻ╬ęéā▀ĆūC├„┴╦Ž“ MAPF ╠Ē╝ėĮ╗ōQ▓┘ū„▓╗Ģ■į┌└Ēšō╔Ž£p╔┘ŲõÅ═ļsČ╚Ż¼Ą½╩╣Ą├ PERR ▒╚ MAPF Ė³╚▌ęūĮŌøQĪŻė╔┤╦«a╔·Ą─į┌▓╗═¼Ą─īŹļHł÷Š░ųąĄ─▀B└må¢Ņ}Ż║ĪĖę╗éĆėą║▄ČÓ░³╣³Ą─┤·└ĒĪ╣«a╔·ĮøĄõĄ─▐r┤ÕÓ]▀fåTå¢Ņ}(rural postman problem);ĪĖ┤·└Ē┼c░³╣³ę╗śėČÓĪ╣«a╔· MAPFĪóTAPF ╗“ PERRĪŻ┴╦ĮŌ▀@ā╔éĆśOČ╦å¢Ņ}ėąų·ė┌╬ęéāĮŌøQę╗░Ńå¢Ņ}Ż¼š²╚ńŲõ╦³įSČÓšµīŹ╩└Įń╚╬䚥─ę¬Ū¾ę╗śėĪŻ
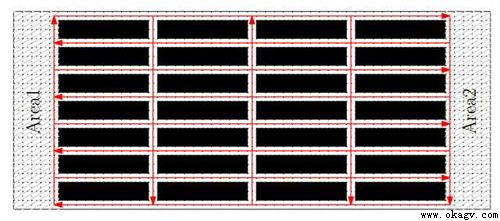
łD 2Ż║į┌ę╗éĆ─ŻöMĄ─ Kiva é}ÄņŽĄĮyųąė├æ¶╠ß╣®Ą─Ė▀╦┘┬Ę(highway)
4 ╠Į╦„å¢Ņ}Ą─ĮYśŗ║═▀\äėĄ─┐╔ŅA£yąį
┤·└Ē┼c╚╦╣▓ŽĒ╣żū„┐šķgŻ¼╦³éā▀\äėĄ─ę╗ų┬ąį║═Ųõ▀\äėĮY╣¹Ą─┐╔ŅA£yąįī”ė┌╚╦ŅÉĄ─░▓╚½╩Ūųžę¬Ą─Ż¼ę“┤╦▓╗┐╝æ]¼FėąĄ─ MAPF ĘĮĘ©ĪŻ▀@┤┘╩╣╬ęéā╠Į╦„ĮoČ©Ą─ MAPF └²ūėĄ─å¢Ņ}ĮYśŗŻ¼▓óįOėŗę╗éĆ╝żäŅ┤·└Ēčžų°ė├æ¶╠ß╣®Ą─▀ģŠē(edge)╝»║Ž(ĘQ×ķĖ▀╦┘╣½┬Ę)ęŲäėĄ─ĘĮ░Ė[Cohen et al.Ż¼ 2015]ĪŻ╬ęéāį┌║åå╬Ą─┼“├øĘĮ░Ė(inflation scheme)Ą─▒│Š░Ž┬╩╣ė├╗∙ė┌Įø“׳D(experience graph)Ą─Ė▀╦┘╣½┬Ę[Phillips et al.Ż¼ 2012]Ą─ŽļĘ©Ż¼ęįī¦│÷ą┬Ą─åó░lųĄ(heuristic values)Ż¼▀@éĆųĄė├üĒ╝żäŅ MAPF ĘĮĘ©ĘĄ╗ž░³└©Ė▀╦┘╣½┬Ę▀ģŠēĄ─┬ĘÅĮŻ¼▀@ĘNĘĮĘ©─▄ē“▒▄├Ō┤·└Ēų«ķgĄ─ėŁ├µ┼÷ū▓(head-to-head collisions)Ż¼▓óīŹ¼FŲõ▀\äėĄ─ę╗ų┬ąį║═┐╔ŅA£yąįĪŻ└²╚ńŻ¼į┌ Kiva é}ÄņŽĄĮyųąŻ¼╬ęéā┐╔ęįčžų°┤µā”╬╗ų├ų«ķgĄ─¬MšŁ═©Ą└įOėŗĖ▀╦┘╣½┬ĘŻ¼╚ńłD2ųąĄ─╝²Ņ^╦∙╩ŠĪŻ╬ęéāęčĮøį┌─ŻöMĄ─ Kiva é}ÄņŽĄĮyųąūC├„Ż¼▀@śėĄ─Ė▀╦┘╣½┬Ę─▄ē“’@ų°╝ė╦┘ MAPF ĘĮĘ©Ż¼═¼Ģr▒Ż│ųŲ┌═¹Ą─ MAPF ĮŌøQĘĮ░Ė│╔▒ŠĄ─ėąŽ▐┤╬ā׹įĪŻ TAPF ║═ PERR └²ūėĄ─å¢Ņ}ĮYśŗę▓┐╔ęį└¹ė├ŽÓ═¼Ą─ĘĮĘ©ĪŻį┌┐╔ąąąį蹊┐ųąŻ¼╬ęéā▀Ćķ_░l┴╦┼cė├æ¶╠ß╣®╣½┬ĘŽÓµŪ├└Ą─ūįäė╔·│╔╣½┬ĘĄ─ĘĮĘ©ĪŻ
5 ĮŌøQ▓╗═Ļ├└Ą─ęÄäØł╠ąą─▄┴”
ūŅŽ╚▀MĄ─ MAPF ╗“ TAPF ĘĮĘ©┐╔ęįį┌║Ž└ĒĄ─ėŗ╦ŃĢrķgā╚×ķöĄ░┘éĆ┤·└ĒšęĄĮūŅ╝čĄ─╗“š▀į┌ė├æ¶╠ß╣®Ą─┤╬ā׹į▒ŻūCŽ┬Ą─▓╗Ģ■░l╔·┼÷ū▓Ą─┬ĘÅĮĪŻ╦³éā╔§ų┴į┌ļsüyČ°Šo£ÉĄ─ŁhŠ│ųąę▓─▄š²│Ż╣żū„Ż¼╚ńKiva é}ÄņŽĄĮyĪŻ╚╗Č°Ż¼┤·└Ē═©│ŻŠ▀ėą▓╗═Ļ├└Ą─ęÄäØł╠ąą─▄┴”Ż¼▓óŪę▓╗─▄═Ļ├└Ąž═¼▓Į╦³éāĄ─▀\äėŻ¼▀@┐╔ęįī¦ų┬ŅlĘ▒Ą─ųžą┬ęÄäØ▓ó└╦┘MĢrķgĪŻę“┤╦Ż¼╬ęéā╠ß│÷┴╦ę╗éĆ┐“╝▄Ż¼╩╣ė├ę╗éĆ║åå╬Ą─ĢrķgŠWĮjüĒėąą¦Ąž║¾Ų┌╠Ä└Ē MAPF ĮŌøQĘĮ░Ė▓óäōĮ©ę╗éĆęÄäØł╠ąą░▓┼┼Ż¼▀@▀mė├ė┌ĘŪ═Ļš¹ÖCŲ„╚╦(non-holonomic robot)Ż¼┐╝æ]ĄĮ╦³éāĄ─ūŅ┤¾Ą─ŲĮęŲ║═ą²▐D╦┘Č╚Ż¼╠ß╣®┴╦ę╗éĆÖCŲ„╚╦ų«ķg░▓╚½ŠÓļx║═╦╔│┌▀ģĮń(Č©┴x×ķūŅą┬║═ūŅįń▀M╚ļĢrķgĄ─Ąž³cĄ─▓Ņ«É)Ą─▒ŻūCŻ¼ęįŠÅĮŌ▓╗═Ļ├└Ą─ęÄäØł╠ąą▓ó▒▄├Ōį┌įSČÓŪķørŽ┬Ą─Ģrķg├▄╝»Ą─ųžą┬ęÄäØ[Honig Ī¦ et al.Ż¼ 2016]ĪŻ▀@éĆ┐“╝▄ęčĮøį┌Ę┬šµ║═šµīŹÖCŲ„╚╦ųąĄ├ĄĮįu╣└ĪŻTAPF ║═ PERR ĘĮĘ©ę▓┐╔ęįį┌═¼ę╗┐“╝▄ųąæ¬ė├ĪŻ╬┤üĒ╣żū„ųąę¬ĮŌøQĄ─å¢Ņ}░³└©į÷╝ėė├æ¶╠ß╣®Ą─░▓╚½ŠÓļxĪóŅ~═ŌĄ─▀\äė╝s╩°Īó▓╗┤_Č©ąįęÄäØ║═ųžą┬ęÄäØĪŻ
6 ĮYšō
╬ęéāėæšō┴╦╦─éĆ蹊┐ĘĮŽ“Ż¼ęįĮŌøQ«öīó MAPF ĘĮĘ©═ŲÅVĄĮīŹļHł÷Š░ųą║═╠Į╦„å¢Ņ}ĮYśŗ╗“¼Fėą MAPF ĘĮĘ©Ģr│÷¼FĄ─å¢Ņ}ĪŻ╬ęéāĄ──┐ś╦╩Ū×ķį┌ MAPF ŅIė“╣żū„Ą─蹊┐╚╦åTųĖ│÷ėą╚żĄ─蹊┐ĘĮŽ“ĪŻ
╔Žę╗ŚlŻ║AGVė├ė┌ÖC▄ć▐DŽ“╝▄čb┼õ╝░Özą▐ŠĆ Ž┬ę╗ŚlŻ║╝ż╣ŌAGV▓µ▄ćį┌ļŖūėļŖŲ„ąąśIĄ─é}Äņæ¬ė├
ļŖįÆŻ║0755-29851810
é„šµŻ║0755-27307147
Q QŻ║2448209188
Ó]ŽõŻ║zfj@okagv.com
ĄžųĘŻ║╔Ņ█┌╩ąīÜ░▓ģ^ĖŻ║ŻĮųĄ└┤¾č¾┬Ęųą╝ZĖŻ░▓ÖCŲ„╚╦┐Ų╝╝ł@14ŚØ

Copyright © 2012-2023 ╔Ņ█┌╩ąÜWµzųŪ─▄ÖCŲ„╚╦╣╔Ę▌ėąŽ▐╣½╦Š ░µÖÓ╦∙ėąĪĪ ╗øICPéõ 19115608 ╠¢ĪĪxml sitemap
┬ōŽĄļŖįÆ
400-007-3860QQū╔įā
2448209188╬óą┼
╬óą┼ū╔įā